Detailed description
2.1 NC/PLC interface signals
Basic logic functions: Various NC/PLC interface signals and functions (A2)
Function Manual, 11/2006, 6FC5397-0BP10-2BA0
15
Function: Hold
The hold function does not correct the setpoint position of the machine axis to the actual
position. If the machine axis moves away from the setpoint position, a following error
(difference between setpoint and actual position) is generated. This error is corrected
"suddenly" when the servo enable is set by the position controller, without observing the
axial acceleration characteristic.
The following interface signals have to be set for the hold function:
DB31, ... DBX2.1 = 0 (servo enable)
DB31, ... DBX1.4 == 0 (follow-up mode)
Feedback:
DB31, ... DBX61.3 = 0 (follow-up mode active)
During "hold", clamping or zero-speed monitoring are active.
Notice
With the "hold" function, once the servo enable has been set, the setpoint/actual-value
difference is corrected: directly by the position controller, i.e., without following the axial
acceleration characteristic.
Application example
Positioning response of machine axis Y following clamping when "servo enable" set.
Clamping pushed the machine axis from the actual position Y
1
to the clamping position Y
k
.
B
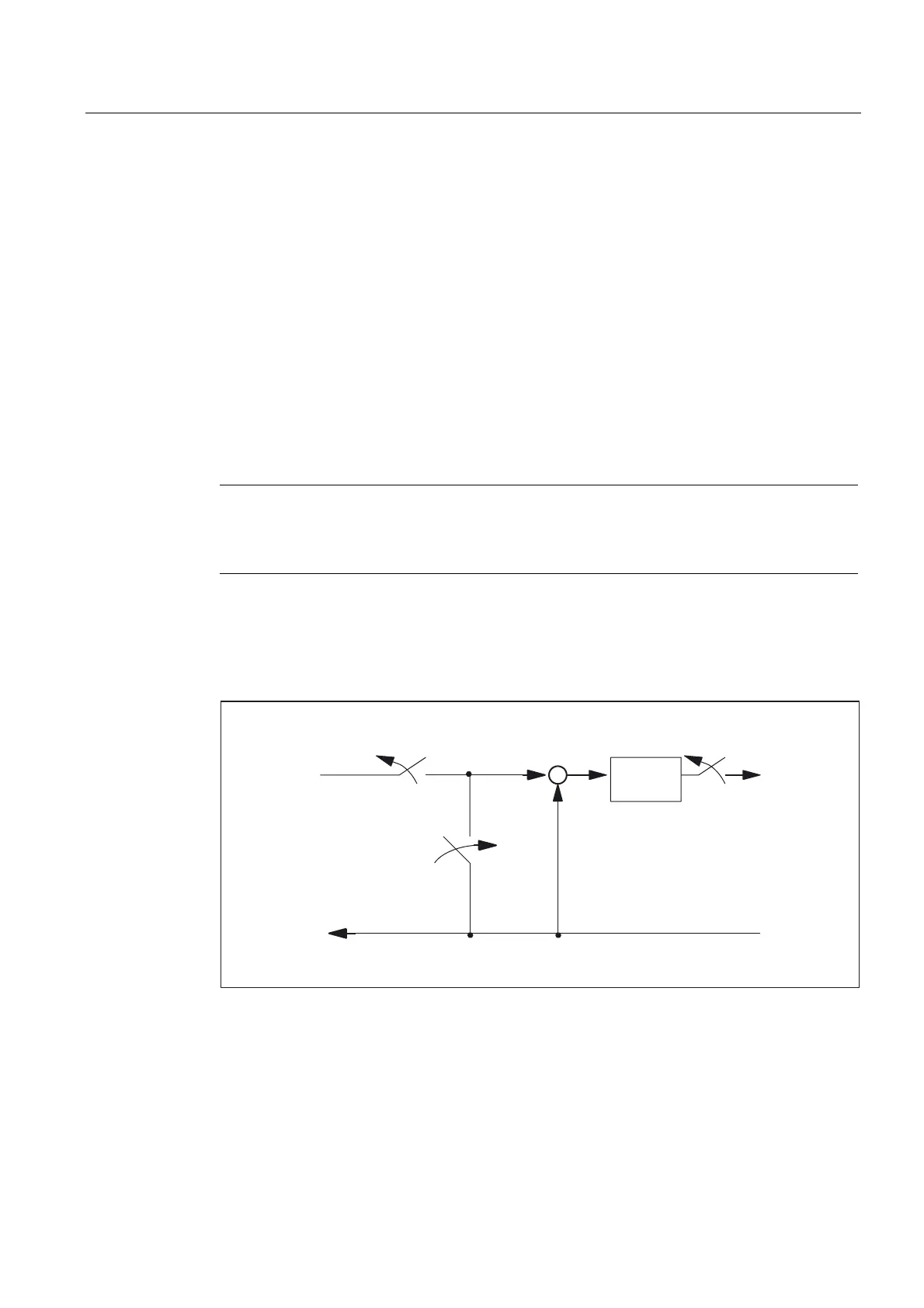
3RVLWLRQ
FRQWUROOHU
3RVLWLRQVHWSRLQW
IURP,32
6HWSRLQW
IROORZXS
&RQWUROOHUHQDEOH
FDQFHOHG
3RVLWLRQ
DFWXDOYDOXH
Figure 2-1 Effect of servo enable and follow-up mode

 Loading...
Loading...



















