Basic logic functions: Axes, coordinate systems, frames (K2)
Function Manual, 11/2006, 6FC5397-0BP10-2BA0
15
Detailed description
2
2.1 Axes
2.1.1 Overview
3RVLWLRQLQJD[HV
&RPPDQGD[HV
5HFLSURFDWLQJD[HV
3/&D[HV
6\QFKURQR
XVBD[HV
/LQHDUD[HV
5RWDU\D[HV
*HRPHWU\D[HV 6SHFLDOD[HV
&KDQQHOD[HV
3DWKD[HV
.LQHPDWLF
WUDQVIRUPDWLRQ
0DFKLQHD[HV
6SLQGOHD[HV
*DQWU\D[HV
&RXSOHGPRWLRQD[HV
*XLGHYDOXHFRXSOLQJD[HV
)HHGUDWHGHWHU
PLQHGSDWKD[HV
)*5283
2ULHQWDWLRQD[HV
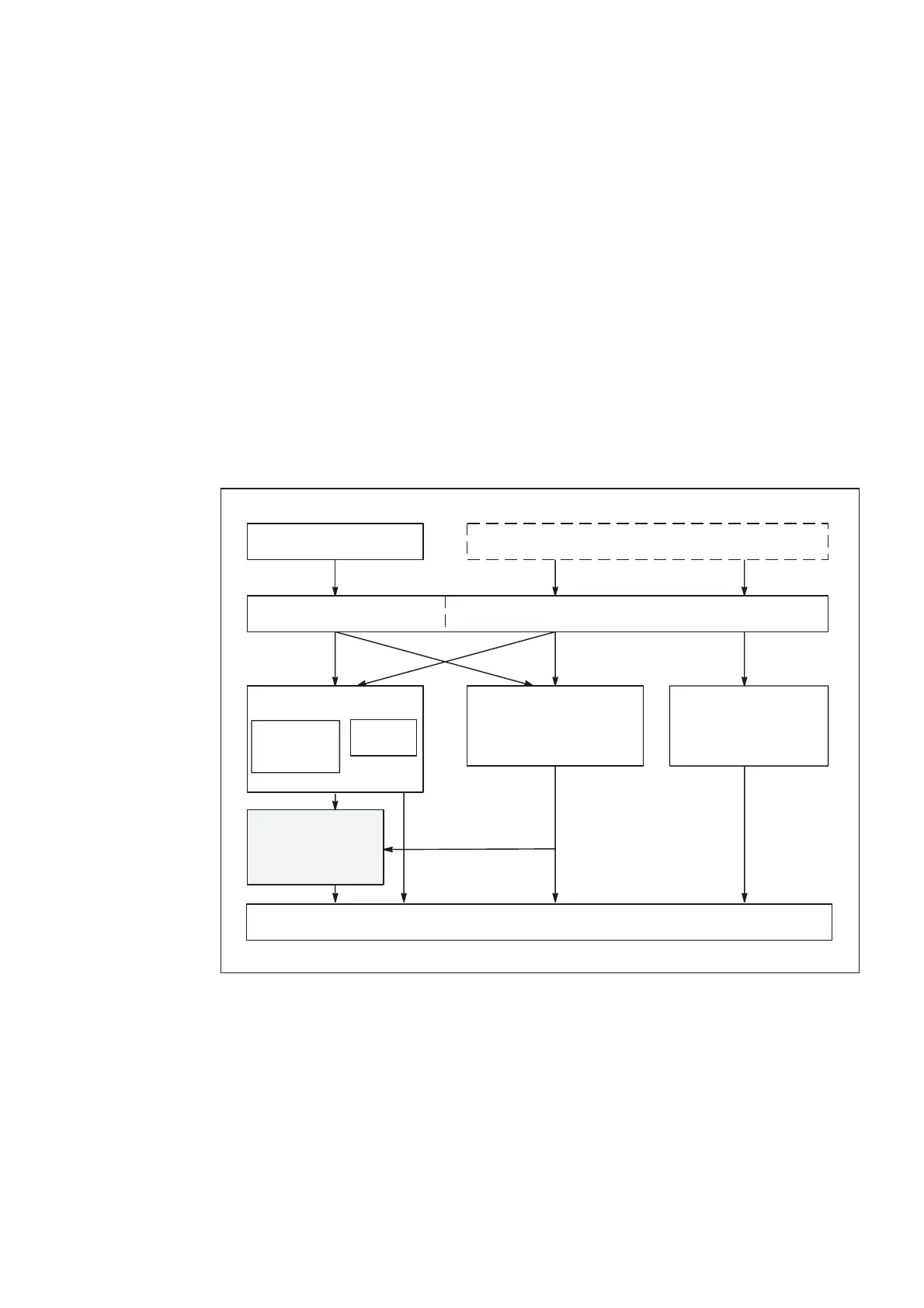
Figure 2-1 Relationship between geometry axes, special axes and machine axes