Examples
4.2 Jerk
Basic logic functions: Acceleration (B2)
56 Function Manual, 11/2006, 6FC5397-0BP10-2BA0
295 295
295
W>PV@
Y>PV@
51'051'0
11
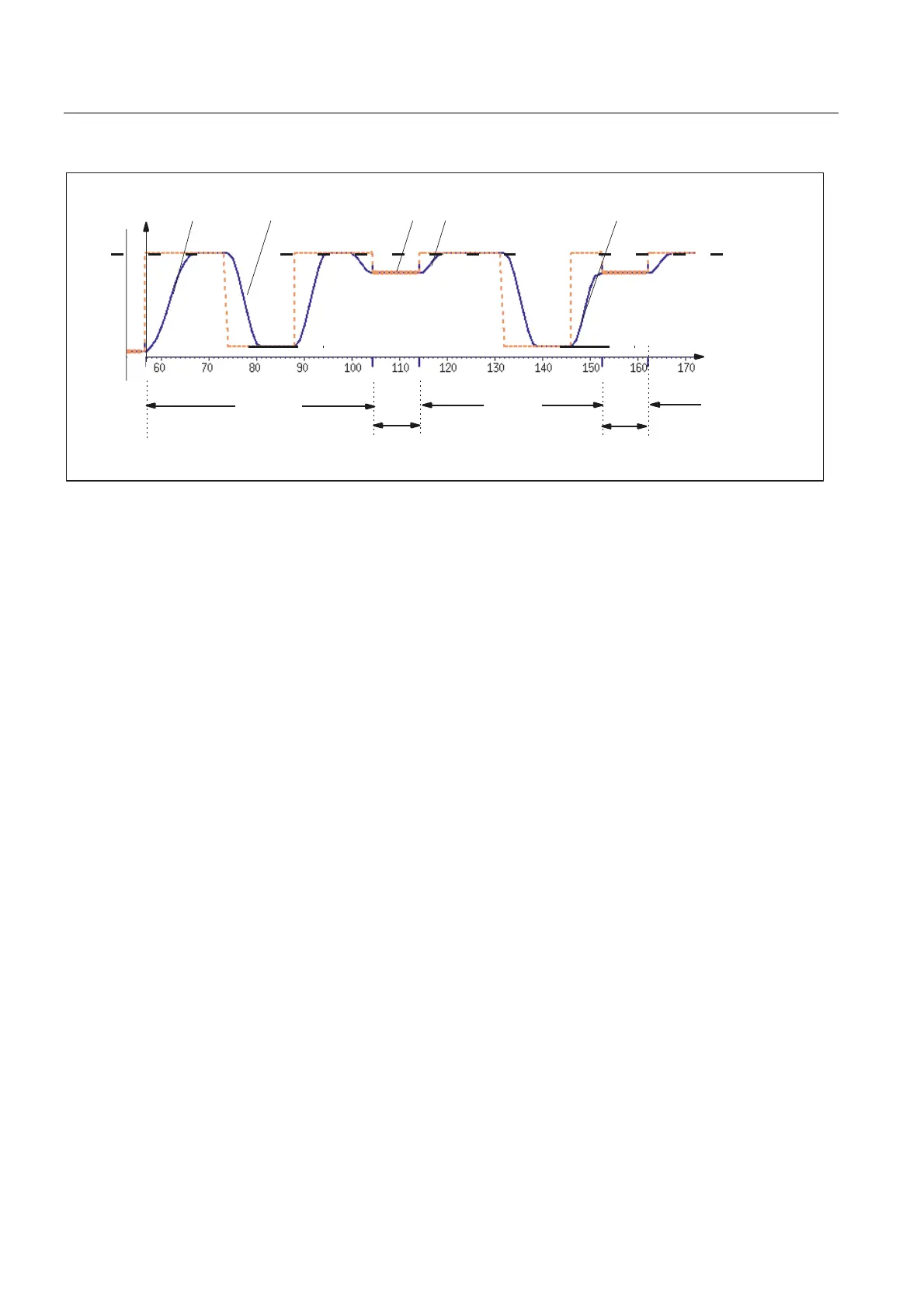
Figure 4-2 Switching between path jerk specified during preprocessing and $AC_PATHJERK
Acceleration profile: SOFT
1: Jerk according to $MA_MAX_AX_JERK[..]
2: Jerk according to $AC_PATHJERK
3: Jerk according to $MA_MAX_AX_JERK[..] (approach block end velocity)
4: Velocity limit due to arc
5: Jerk according to $AC_PATHJERK

 Loading...
Loading...



















