Detailed description
2.3 Coordinate systems
Basic logic functions: Axes, coordinate systems, frames (K2)
Function Manual, 11/2006, 6FC5397-0BP10-2BA0
39
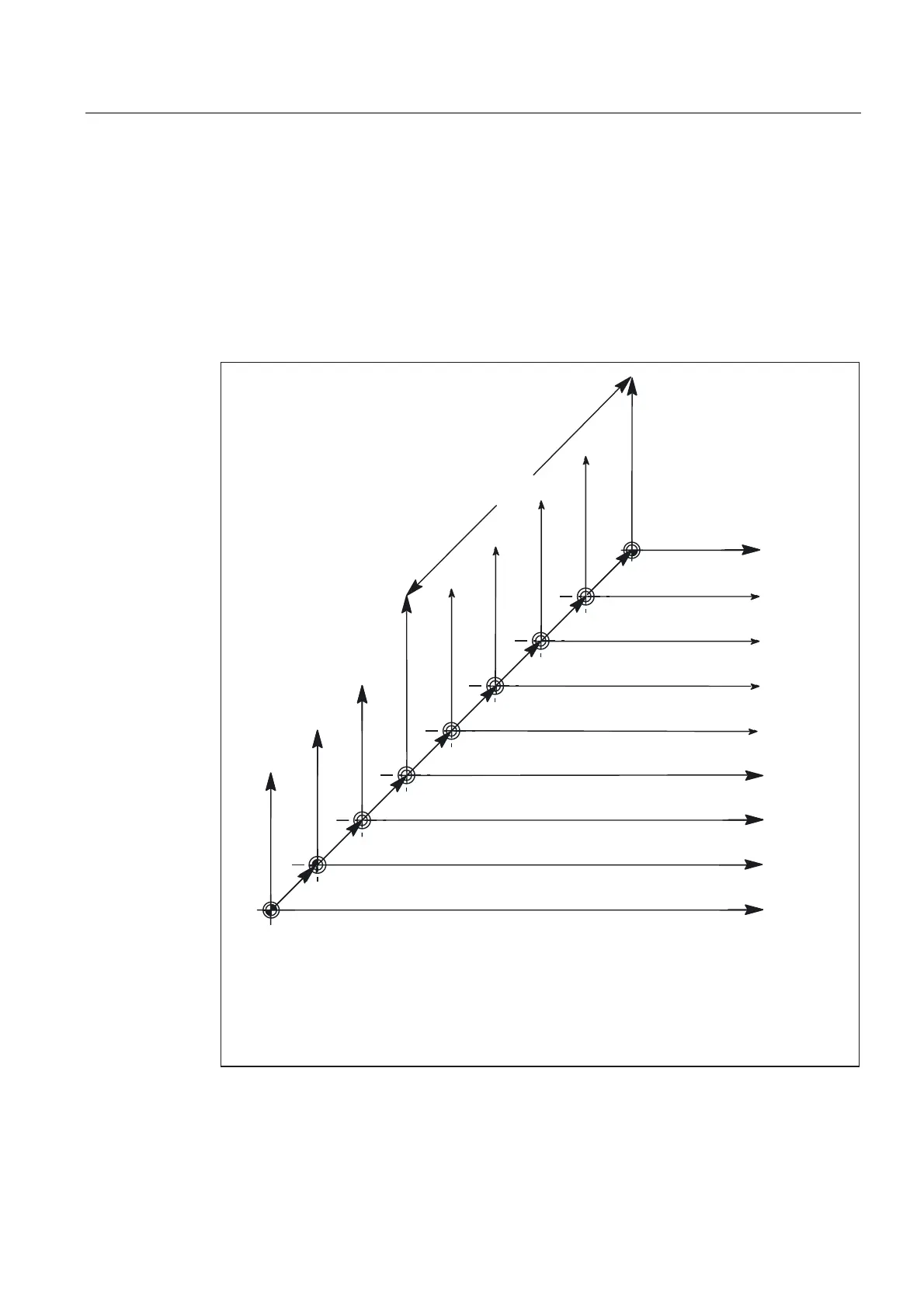
Interrelationships between coordinate systems
The coordinate systems are determined by the kinematic transformation and the FRAMES.
A kinematic transformation is used to derive the BCS from the MCS. If no kinematic
transformation is active, the BCS is the same as the MCS.
The basic frame maps the BCS onto the BKS.
An activated adjustable FRAME G54...G599 ENS is derived from the BNS.
The WCS, which is the basis for programming, is defined by the programmable FRAME.
)UDPHIRUF\FOHVSURJUDPPDEOH
IUDPHWUDQVIRUPDWLRQV
+RPHSRVLWLRQRIIVHW
)UDPHFKDLQ
6=6 6HWWDEOH=HUR6\VWHP
%=6 %DVLF=HUR6\VWHP
:&6 :RUNSLHFH&RRUGLQDWH6\VWHP
%&6 %DVLF&RRUGLQDWH6\VWHP
0&6 0DFKLQH&RRUGLQDWH6\VWHP
&KDLQHGV\VWHPIUDPHVIRU3$52735(6(7
VFUDWFKLQJ]HURRIIVHWH[WHUQDO
&KDLQHGILHOGRIEDVLFIUDPHV
FKDQQHOVSHFDQGRU1&8JOREDO
*WR*VHWWDEOHIUDPH
FKDQQHOVSHFRU1&8JOREDO
6\VWHPIUDPHIRU72527
72)5$0(ZRUNSLHFHV
%&6
%=6
6=6
:&6
0&6
+DQGZKHHO'5)RIIVHWVXSHULPSRVHGPRYHPHQW]HUR
RIIVHWH[WHUQDO
.LQHPDWLFWUDQVIRUPDWLRQ
Figure 2-12 Interrelationships between coordinate systems

 Loading...
Loading...



















