Detailed description
2.4 Frames
Basic logic functions: Axes, coordinate systems, frames (K2)
Function Manual, 11/2006, 6FC5397-0BP10-2BA0
57
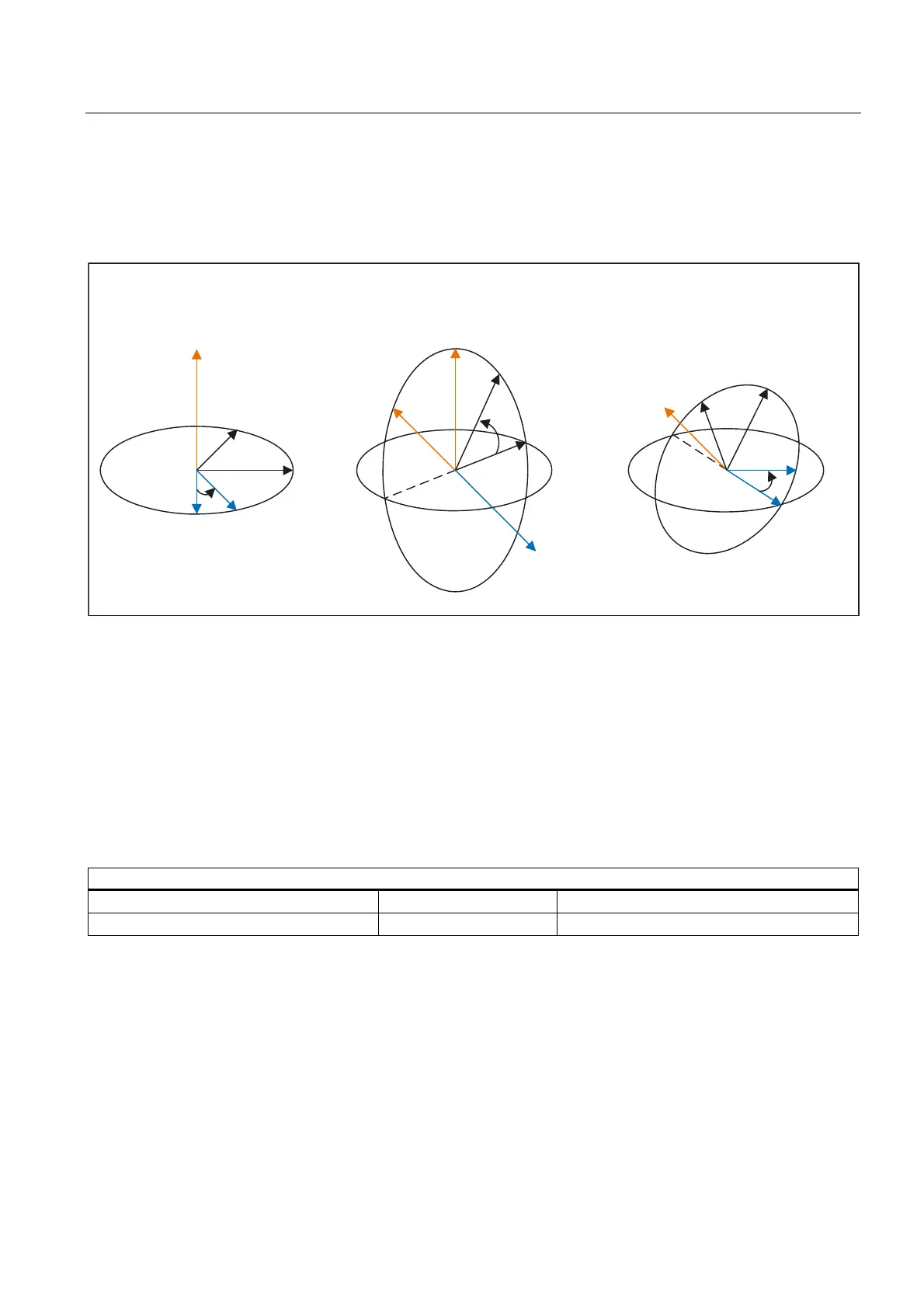
Euler angle
Rotations with a Euler angle are carried out in the order Z, X', Z''.
5RWDWLRQDERXW]
5RWDWLRQDERXW[ 5RWDWLRQDERXW]
[
[
\
\
]
\
[ [
]
\
]
[
[
\
\
] ]
The angles are only defined ambiguously in the following ranges:
0 <= x < 180
-180 <= Y <= 180
-180 <= z <= 180
The written angles can be uniquely read back again in these areas. When rotations that are
larger than the specified angles are entered, these are converted to a mode of
representation that does not exceed the specified range limits.
RPY example
$P_UIFR[1]=crot(x,10,y,90,z,40)
returns on reading back
$P_UIFR[1]=crot(x,0,y,90,z,30)
$P_UIFR[1]=crot(x,190,y,0,z,-200)
delivers during reading:
$P_UIFR[1]=crot(x,-170,y,0,z,160)
On writing and reading frame rotation components, these limits should be observed so the
same results are achieved on writing and reading, or on repeated writing.
Programming
The program commands below are used to program the rotation:
$P_UIFR[1]=CROT(x,10,y,10)
ROT x=10 y=10
$P_UIFR[1,x,rt]=10

 Loading...
Loading...



















