310
For critical oscillation method: user needs to set the sampling time at the beginning of the
auto tune process. For slow response system, 1000ms. For fast response system, 10-100ms.
For critical oscillation method: the system can start the auto tune at any state. For object
temperature, the current temperature doesn’t need to be same to ambient temperature.
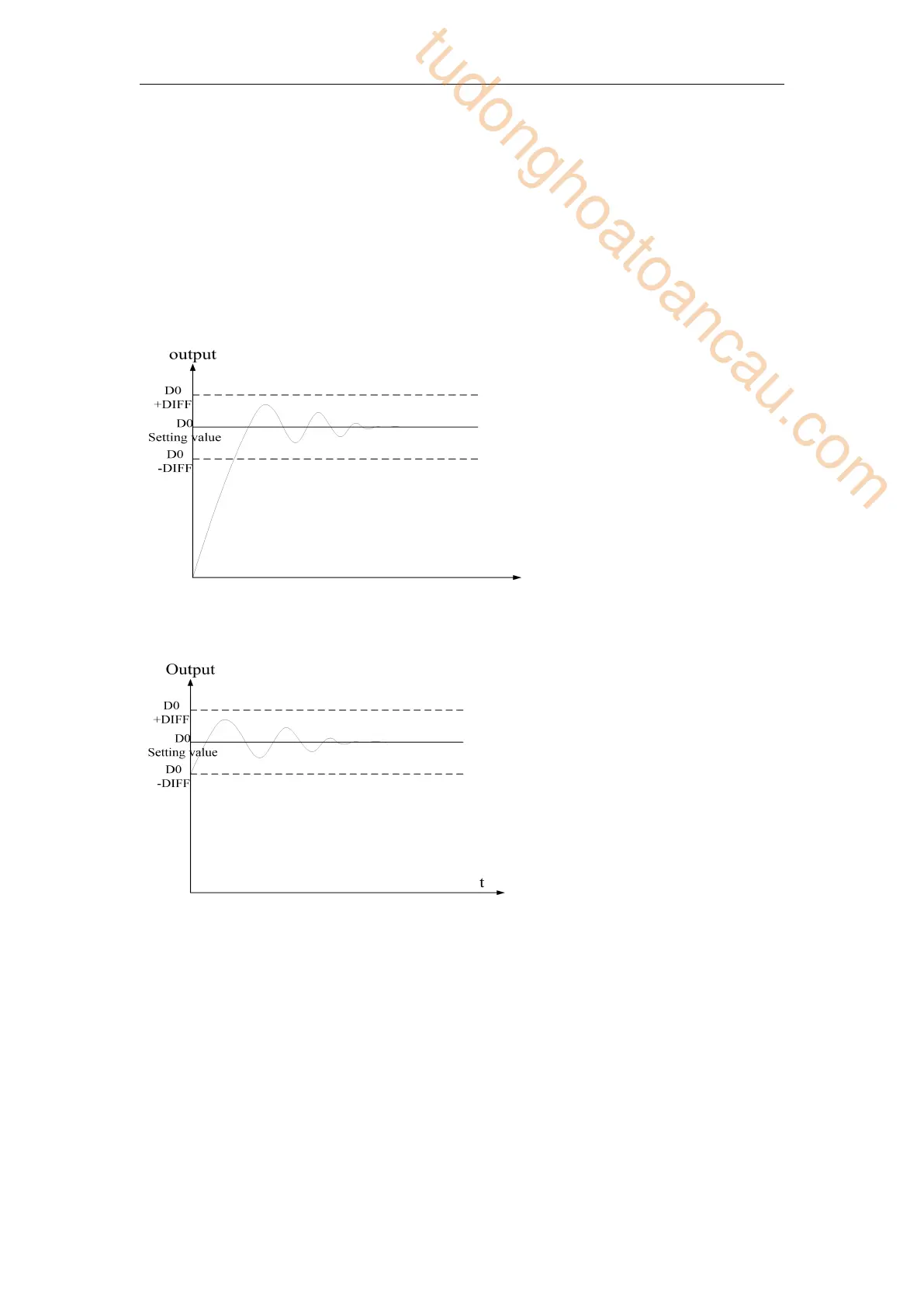
Two different methods and PID control diagram:
(1) Step response method
Make sure current temperature is equal to ambient temperature
(2) Critical oscillation method
The auto tune start temperature can be any value.
To enter the auto tune mode, please set bit7 of (S3+ 2) to be 1 and turn on PID working
condition. If bit8 of (S3+ 2) turn to 1, it means the auto tune is successful.
PID auto tune period value [S3+12]
Set this value in S3+12 during auto tune. This value decides the auto tune performance, in a
general way, set this value to be AD result corresponding to one standard tested unit. The
default value is 10. The suggested setting range: fall-scale AD result×0.3~1%.
User doesn’t need to change this value. However, if the system is interfered greatly by outside,
this value should be increased modestly to avoid wrong judgment of positive and negative
movement. If this value is too large, the PID control period (sampling time) got from the auto
tune process will be too long. As the result do not set this value too large.
tudonghoatoancau.com
 Loading...
Loading...