4 Operation
4.2.7 Holding Brakes
4-18
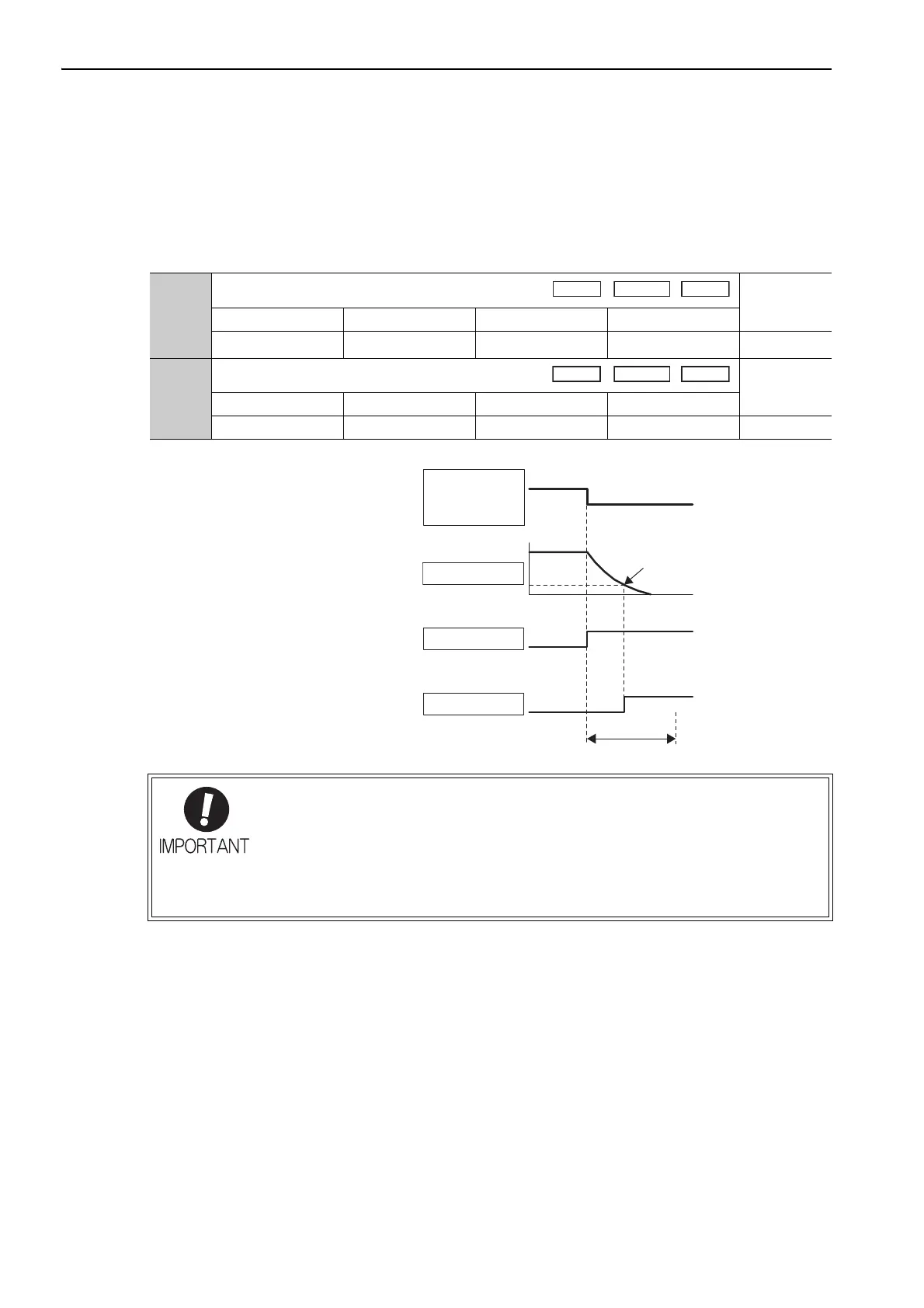
(5) Brake Signal (/BK) Output Timing during Servomotor Rotation
If an alarm occurs while the servomotor is rotating, the servomotor will come to a stop and the brake signal
(/BK) will be turned OFF. The timing of brake signal (/BK) output can be adjusted by setting the brake refer-
ence output speed level (Pn507) and the waiting time for brake signal when motor running (Pn508).
Note: If the servomotor is set so that it comes to a zero-speed stop for an alarm, follow the information in (4) Brake ON
Timing after the Servomotor Stops after the servomotor comes to a stop for a zero position reference.
Pn507
Brake Reference Output Speed Level
Classification
Setting Range Setting Unit Factory Setting When Enabled
0 to 10000
1 min
-1
100 Immediately Setup
Pn508
Waiting Time for Brake Signal When Motor Running
Classification
Setting Range Setting Unit Factory Setting When Enabled
10 to 100 10 ms 50 Immediately Setup
Position
Position
/BK Signal Output Conditions
When Servomotor Rotating
The /BK signal goes to high level
(brake ON) when either of the fol-
lowing conditions is satisfied:
• When the motor speed falls
below the level set in Pn507
after the power to the servomo-
tor is turned OFF.
• When the time set in Pn508 is
exceeded after the power to the
servomotor is turned OFF.
Servo ON
command
Motor speed
Pn-507
Servo ON
Servo OFF
Pn508
Power to motor
ON
OFF
/BK output
Brake
released
(ON)
Brake applied
(OFF)
Motor stopped by applying
DB or by coastingPn001.0
• The servomotor will be limited to its maximum speed even if the value set in Pn507 is
higher than the maximum speed.
• Do not allocate the rotation detection signal (/TGON) and the brake signal (/BK) to the
same terminal. The /TGON signal will otherwise be turned ON by the falling speed on
a vertical axis, and the brake may not operate.
For the /BK signal, do not use the terminal that is already being used for another
signal.

 Loading...
Loading...



