8 Fully-closed Loop Control
8.3.6 Alarm Detection
8-22
Setting Example
If the servomotor moves 0.2 μm for every pulse of position reference, the external encoder sine wave pitch is
20 μm, and the number of divisions is 256, the electronic gear ratio will be as follow.
Therefore, set 512 for Pn20E (numerator B) and 200 for Pn210 (denominator A).
8.3.6 Alarm Detection
The setting of alarm detection (Pn51B/Pn52A) is shown below.
(1) Excessive Error Level between Servomotor and Load Positions (Pn51B)
This setting detects the difference between the feedback position of the motor encoder and the feedback load
position of the external encoder in fully-closed loop control. If the detected difference is above the set level,
the motor-load position error overflow alarm (A.d10) will be output.
Note: When Pn51B is set to 0, the motor-load position error overflow alarm (A.d10) is not detected.
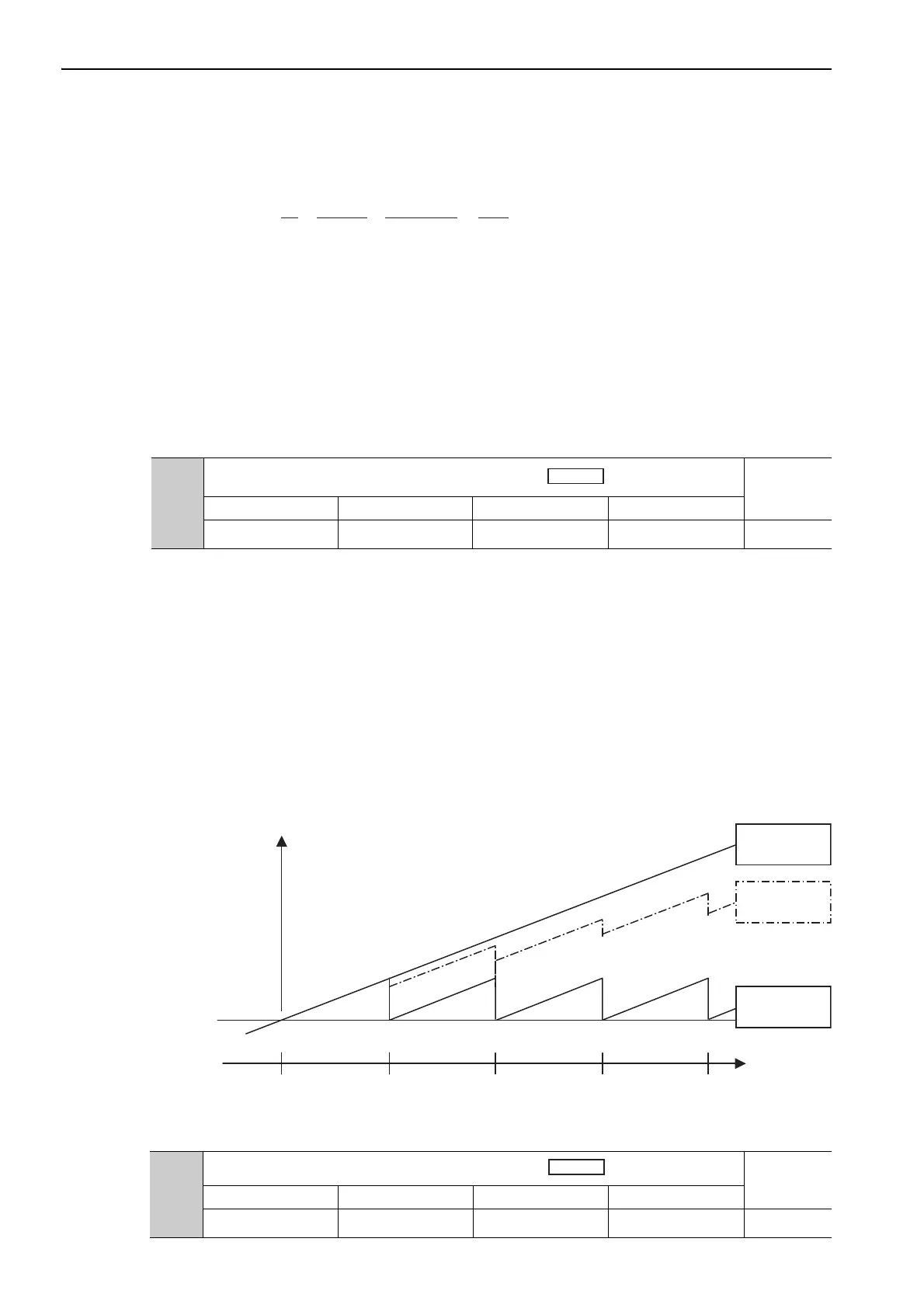
(2) Multiplier per One Fully-closed Rotation (Pn52A)
The coefficient of the error between the external encoder and the motor per motor rotation can be set. This
function can be used to prevent the motor from running out of control due to damage to the external encoder or
to detect slippage of the belt.
Setting Example
Increase the value if the belt slips or is twisted excessively.
If the set value is 0, the external encoder value will be read as it is.
If the factory setting of 20 is used, the second rotation will start with the error for the first motor rotation mul-
tiplied by 0.8. (Refer to the following figure.)
Related Parameter
A
B
Pn210
Pn20E
20
0.2
×
256
200
512
=== =
Electronic gear ratio
Pn51B
Excessive Error Level between Servomotor and
Load Positions
Classifica-
tion
Setting Range Setting Unit Factory Setting When Enabled
0 to 1073741824 1 reference unit 1000 Immediately
Setup
Pn52A=0
Pn52A=100
Pn52A=20
1st
rotation
2nd
rotation
Number of motor rotations
Error between motor and external encoder
3rd
rotation
Less than
one rotation
Small
Big
Pn52A
Multiplier per One Fully-closed Rotation
Classifica-
tion
Setting Range Setting Unit Factory Setting When Enabled
0 to 100 1% 20 Immediately
Setup
Position

 Loading...
Loading...



