6 Utility Functions (Fn)
6-8
6.5 Program JOG Operation (Fn004)
The program JOG operation is a utility function, that allows continuous operation determined by the preset
operation pattern, movement distance, movement speed, acceleration/deceleration time, waiting time, and
number of times of movement.
This function can be used to move the servomotor without it having to be connected to a host controller for the
machine as a trial operation in JOG operation mode. Program JOG operation can be used to confirm the oper-
ation and for simple positioning operations.
(1) Preparation
The following conditions must be met to perform the program JOG operation.
• The write prohibited setting parameter (Fn010) must be set to Write permitted (P.0000).
• The main circuit power supply must be ON.
• All alarms must be cleared.
• The hardwire baseblock (HWBB) must be disabled.
• The servomotor power must be OFF.
• The travel distance and speed must be set correctly considering the machine operation range and safe opera-
tion speed.
• There must be no overtravel.
(2) Additional Information
• The functions that are applicable for position control, such as position reference filter, can be used.
• The overtravel function is enabled in this function.
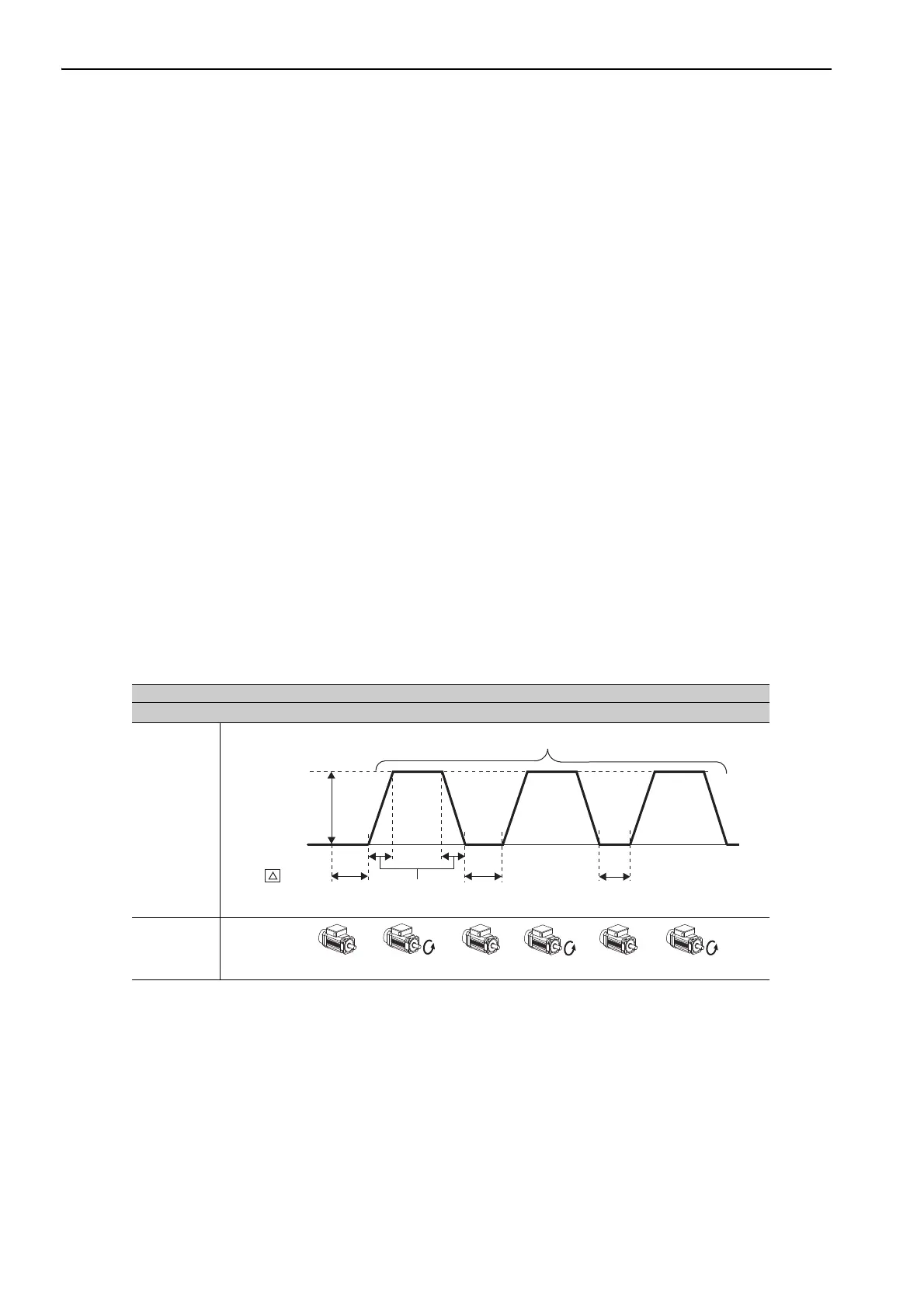
(3) Program JOG Operation Patterns
The following describes an example of program JOG operation pattern. The following example is given when
the rotating direction of the servomotor is set as Pn000.0 = 0 (Forward rotation by forward reference).
Note: When Pn536 (number of times of program JOG movement) is set to 0, infinite time operation is enabled. To stop
infinite time operation, press the JOG/SVON Key to turn OFF the servomotor power.
Pn530.0
= 0
(Waiting time Pn535
→
Forward movement Pn531) × Number of movements Pn536
Speed
Diagram
Servomotor
Run Status
(Stop) (Forward) (Stop) (Forward) (Stop) (Forward)
Movement
speed
Pn533
Key.
Press the
Waiting time
Pn535
Accel/Decel
time
Waiting time
Pn534
Pn535
Waiting time
Pn535
Number of times of movement Pn536
t zero speed
Movement
distance
Pn531
Movement
distance
Pn531
Movement
distance
Pn531

 Loading...
Loading...



