∗1. For details on this function, refer to the manual of the connected command option module.
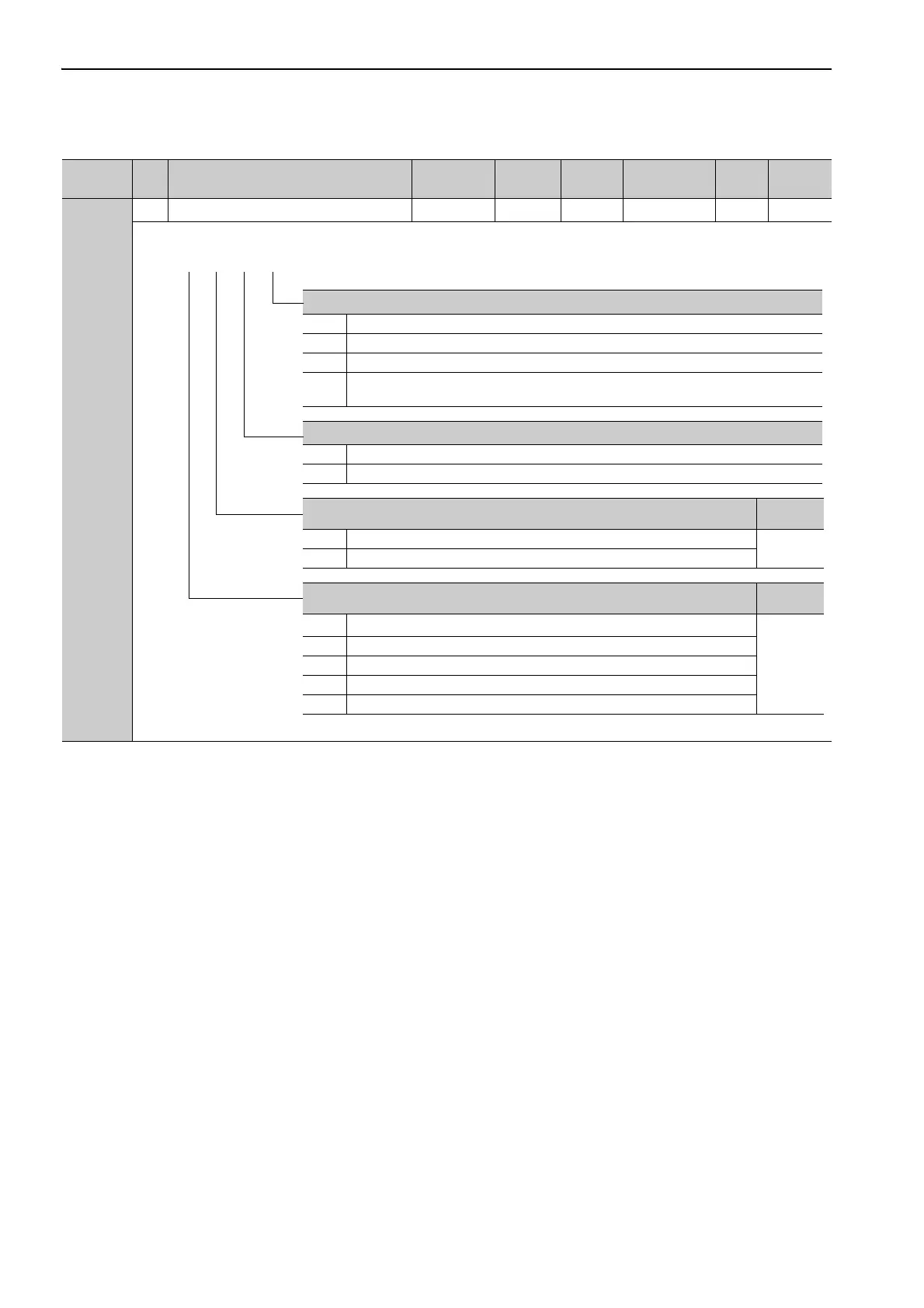
No.
∗The mode will be switched to semi-closed position control if Pn002.3 is set to 0.
Torque Limit Reference Selection for Command Option Module
*1
0 Disables the torque limit reference from the command option module.
1 Enables the torque limit reference from the command option module.
2 Reserved (Do not change.)
3 Enables torque limit reference from the command option module when external input signals P-CL
and N-CL are enabled.
Speed Limit Reference Selection for Command Option Module
*1
0 Disables the speed limit reference when torque limit is used from the command option module.
1 Enables the speed limit reference when torque limit is used from the command option module.
Absolute Encoder Usage
Reference
Section
0 Uses absolute encoder as an absolute encoder.
4.5
1 Uses absolute encoder as an incremental encoder.
External Encoder Usage
Reference
Section
0
Do not use external encoder.
*
8.3.1
1 Uses external encoder in standard rotation direction.
2 Reserved (Do not set.)
3 Uses external encoder in reverse rotation direction.
4 Reserved (Do not set.)
4th 3rd 2nd 1st
digit digit digit digit
n.

 Loading...
Loading...



