51
2 Setting up the Bravo Platform
Configuring external robot access
Bravo Platform User Guide
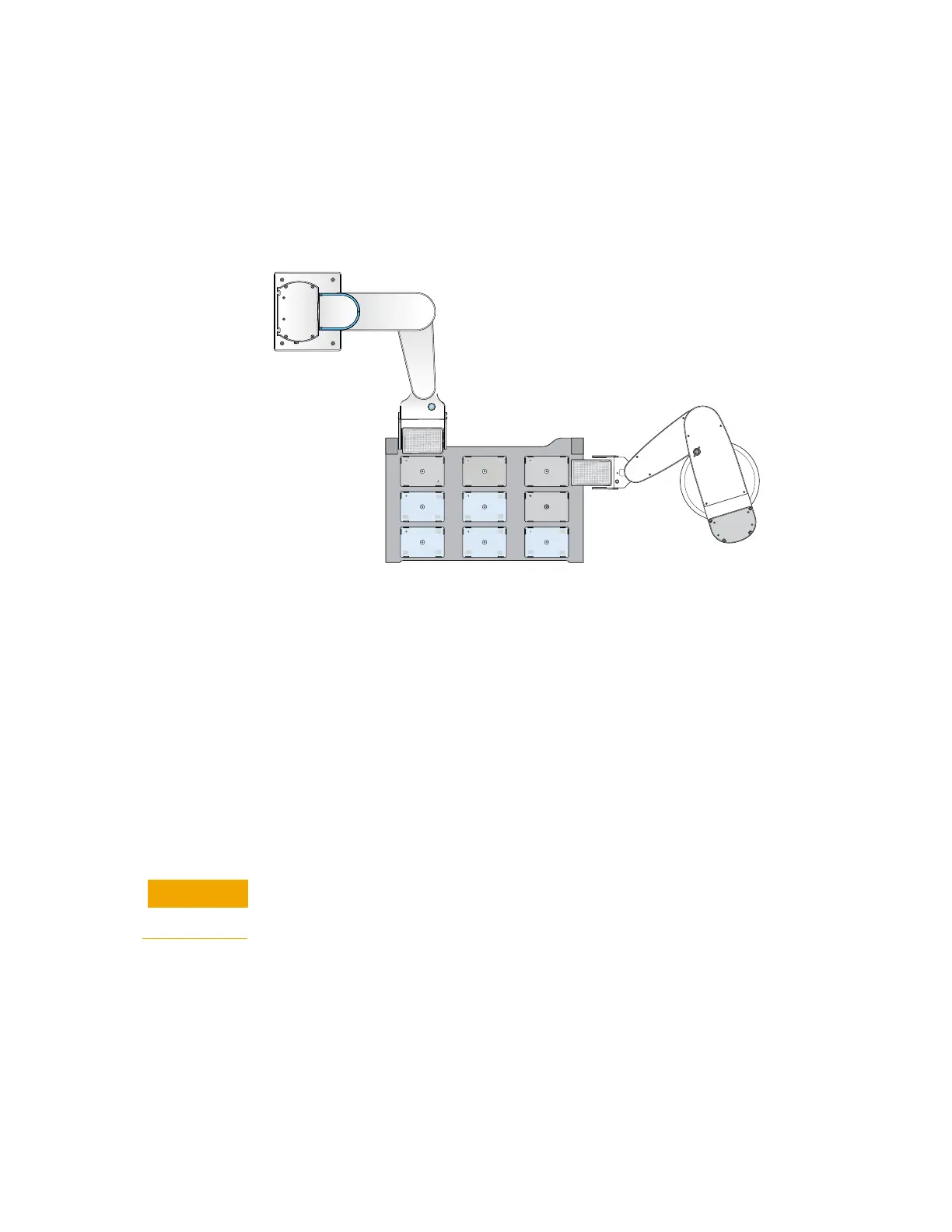
• Direct Drive Robot with a portrait grip. Approaches location 3 at the right side of the
Bravo deck. To be conservative, location 6 is also reserved for this robot and
blocked for access by the Bravo robot.
• Bravo robot. Continues operations at deck locations 4, 5, 7, 8, and 9.
The following figure shows the deck location designations for each of the three robots.
Figure
Deck locations for the Bravo robot (blue), BenchBot robot (gray), and Direct Drive Robot
(gray) operations
Preventing concurrent operation during external robot access
You can use the safe location feature to prevent Bravo operations while an external
robot is accessing the Bravo deck. The safe location feature does the following:
• Allows one robot to access the Bravo deck at any given time. For example, if the
Bravo robot is performing a liquid-handling task, the external robot will wait for the
Bravo robot to finish before approaching the deck. If the external robot is placing or
removing labware from a deck location, the Bravo robot will move to its safe
location wait for the external robot to finish.
• Enables the Bravo robot to move to a specified deck location (safe location)
whenever the external robot approaches the deck to perform a task. For example, if
you specified deck location 1 as the safe location, the Bravo robot will always move
to deck location 1 whenever the external robot approaches.
You can specify any deck location as the Bravo safe location. However, to prevent
potential hardware collisions, you should determine the relative position of the
external robot and its approach before specifying the Bravo safe location.
For guidelines on how to select the safe location, see “Planning the robot access
locations” on page 48.
To prevent concurrent operation during external robot access:
1 In Bravo Diagnostics, click the Profiles tab and select the profile that you want to
update.
2 Click the External Robots tab, and ensure that the select Prevent Bravo operation
during external robot access check box is selected.
00240
00240
Bravo
Plate Orientation
1 2 3
456
78
9
A
1
A
1