74 Rockwell Automation Publication 750-UM006C-EN-P - March 2022
Chapter 4 Configure and Start Up the Drive
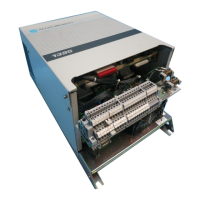
This determines how the drive responds if it looses its EtherNet/IP
connection to the Logix controller. Fault while running or when idle is
the default configuration.
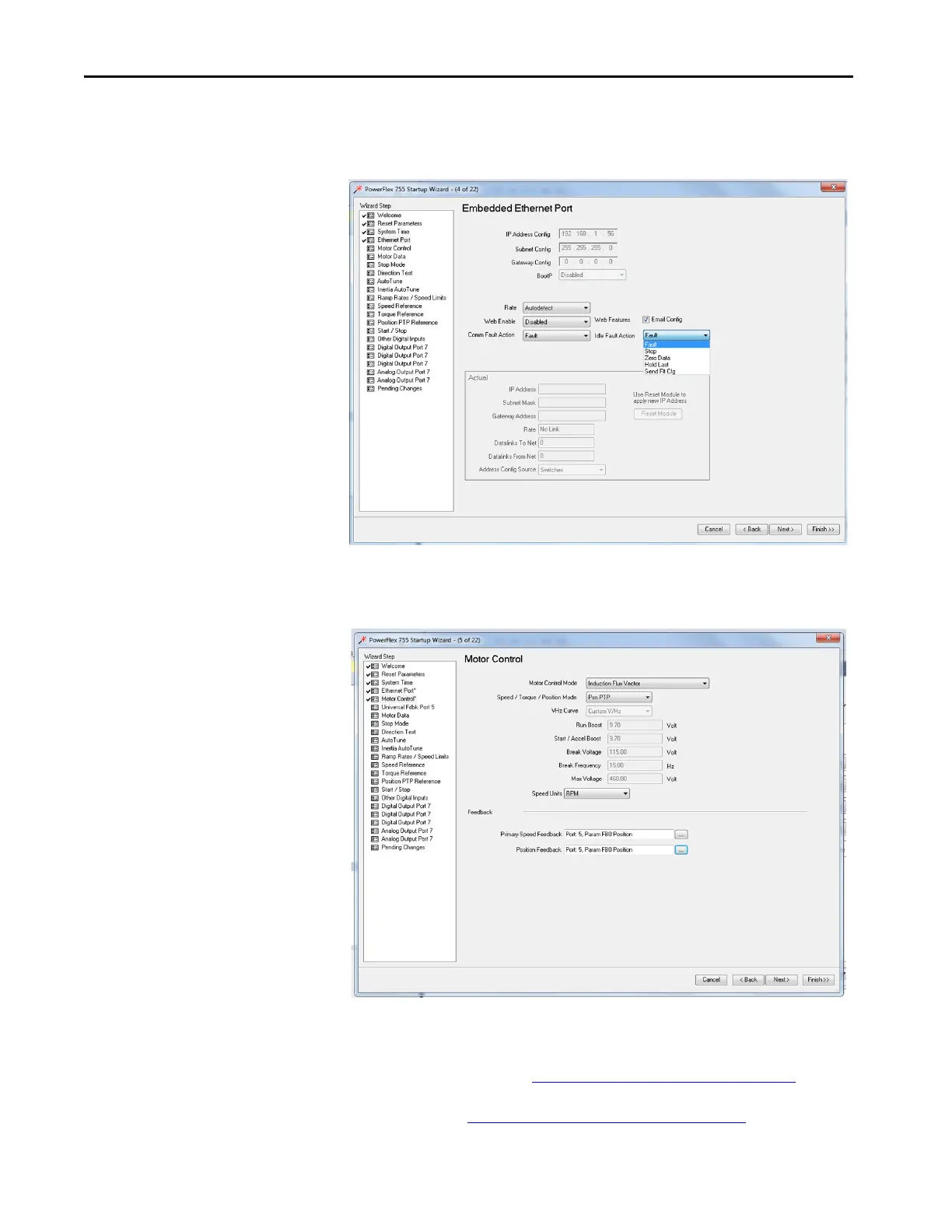
5. On the Motor Control step, select: Motor Control Mode, Speed Units
(RPM is standard), and Feedback Encoders that are used for the Speed
and Position feedback (these typically match). Click Next.
A Universal Feedback device is used in this example, which is compatible with
various encoder types. See the catalog string to confirm encoder type for your
drive. Position r and s in the Catalog Number Explanation
on page 16 provide
this information, the catalog string for your drive can be found on table
completed during Prepare for Initial Drive Startup
on page 49.

 Loading...
Loading...