AX-Series Motion Controller Instructions Manual Chapter 2
219
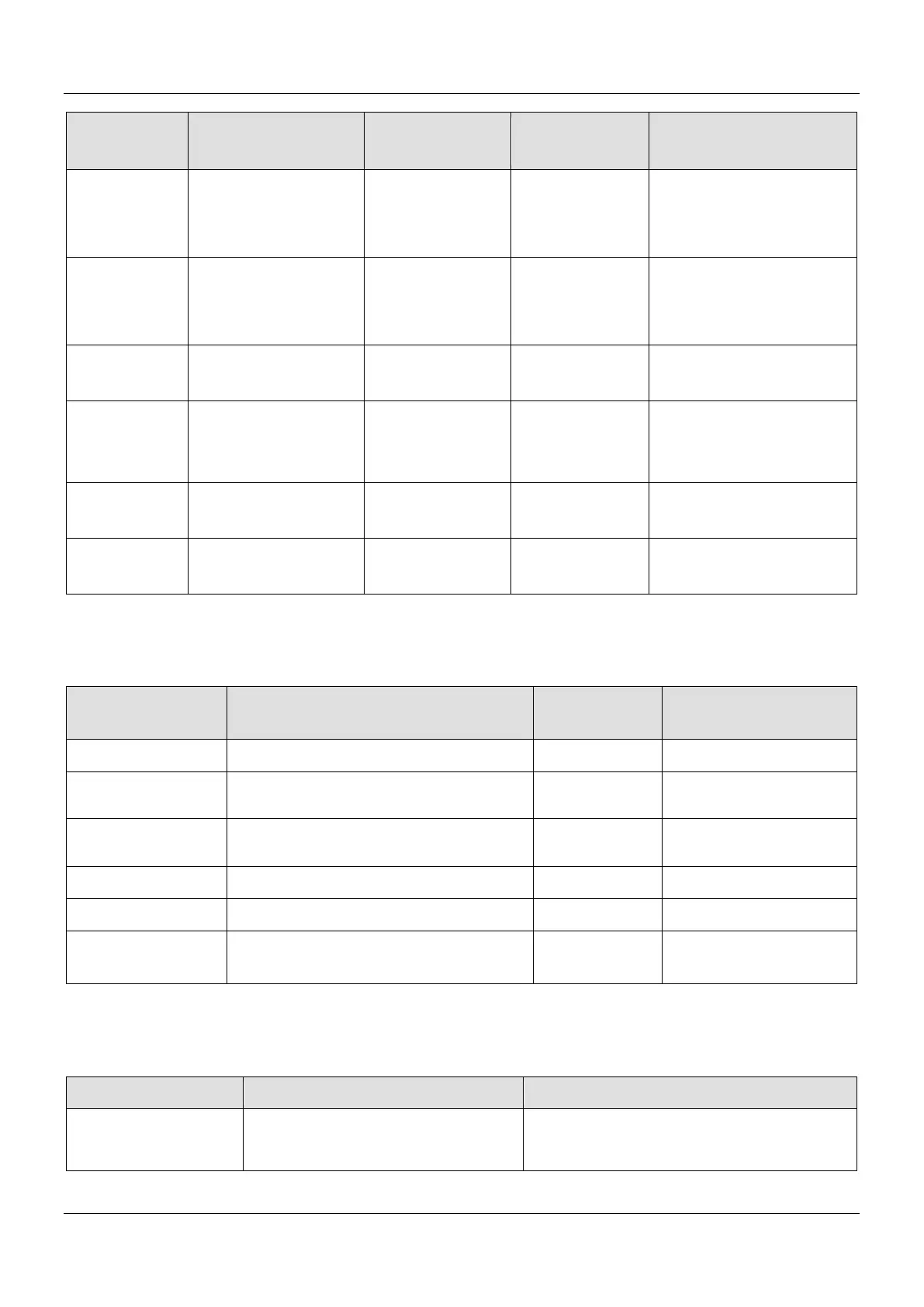
Name
Function Data Type
Setting Value
Timing to Take Effect
lrAcceleration
Specify the acceleration
rate when the motion
starts.
2
LREAL
Positive
(0)
When bExecute is True and
the output bBusy is False.
lrDeceleration
Specify the deceleration
rate when the motion
ends.
2
LREAL
Positive
(0)
When bExecute is True and
the output bBusy is False.
lrJerk
Specify the jerk.
(Unit: User unit/s
3
)
LREAL
Positive
(0)
When bExecute is True and
the output bBusy is False.
Direction
Specify the motion
direction.
MC_DIRECTION
*
-1: negative
1: positive
When bExecute is True and
the output bBusy is False.
lrRoundPhase Set the modulo. LREAL
Positive
(0)
When bExecute is True and
the output bBusy is False.
lrStopPhase
Specify a position or a
phase in the modulo.
LREAL
Positive or 0
(0)
When bExecute is True and
the output bBusy is False.
*Note: MC_DIRECTION: Enumeration (Enum)
Outputs
Name Function Data Type
Output range
bInVelocity True when reaching the target velocity. BOOL True/False (False)
bDone
If the trigger signal is True and the axis position
BOOL True/False (False)
bCommandAborted
True when the instruction is interrupted by
another instruction.
BOOL True/False (False)
True when the instruction is triggered to run.
True when an error occurs.
ErrorID Contains error codes. DMC_ERROR
*
DMC_ERROR
*Note: DMC_ERROR: Enumeration (Enum)
Output Update Timing
Timing for changing to TRUE
Timing for changing to FALSE
bInVelocity
When axis velocity reaches the target
speed.
When bCommandAborted turns to True.
When bExecute is re-triggered, and Velocity is
given a new value.
 Loading...
Loading...

