AX-Series Motion Controller Instructions Manual Chapter 2
166
2.3 Delta Motion Control Instructions
2.3.1 Motion Control Instructions
Motion instructions generally refer to the ability to control the motor to move after the instruction is run. The function blocks used
in this section are from the library "DL_MotionControl*" and the function blocks used can be synchronized with the driver, so
when setting the axis, select the synchronous axis.
For setting up the synchronous axis, refer to section 7.4 in the AX-3 Series Operation Manual.
*Note: When the version of SM3_Basic is not V4.6.1.0 to match with V1.1.0.0 and earlier, an error "Type 'xxxxxx' is not equal to
type 'Axis'VAR_IN_OUT 'AXIS_REF_SM3'" will appear when compiling. Change the Softmotion library version to V4.6.1.0.
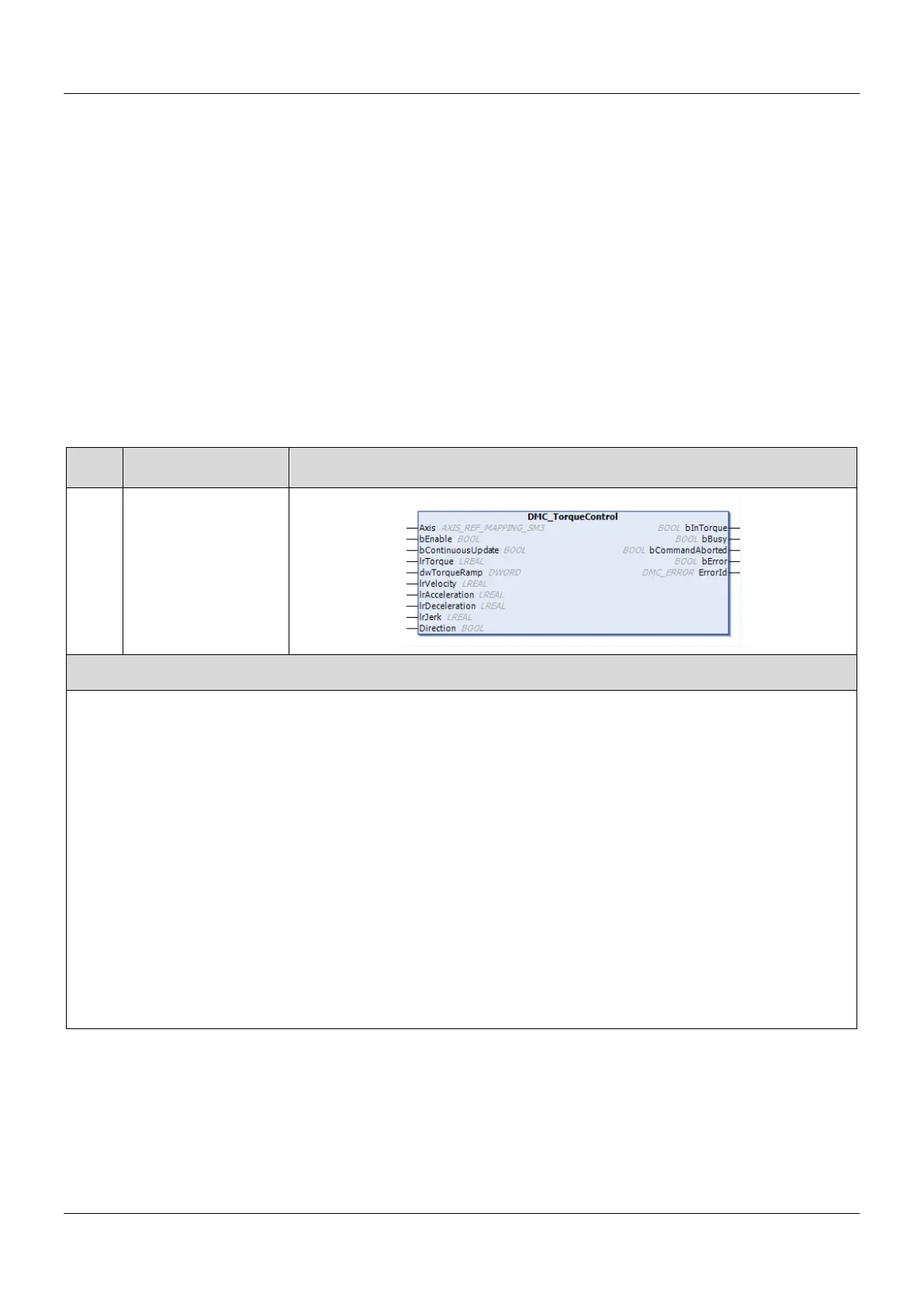
2.3.1.1 DMC_TorqueControl
Supported Devices: AX-308E, AX-364E
DMC_TorqueControl controls the torque according to the torque control mode of the servo drive.
FB/FC Instruction Graphic Expression
FB DMC_TorqueControl
ST Language
DMC_TorqueControl_instance(
Axis : =,
bEnable : =,
bContinuousUpdate : =,
lrTorque : =,
dwTorqueRamp : =,
lrVelocity : =,
lrAcceleration : =,
lrDeceleration : =,
lrJerk : =,
Direction : =,
bInTorque =>,
bBusy =>,
bCommandAborted =>,
bError =>,
ErrorID =>);
Inputs
 Loading...
Loading...

