AX-Series Motion Controller Instructions Manual Chapter 2
165
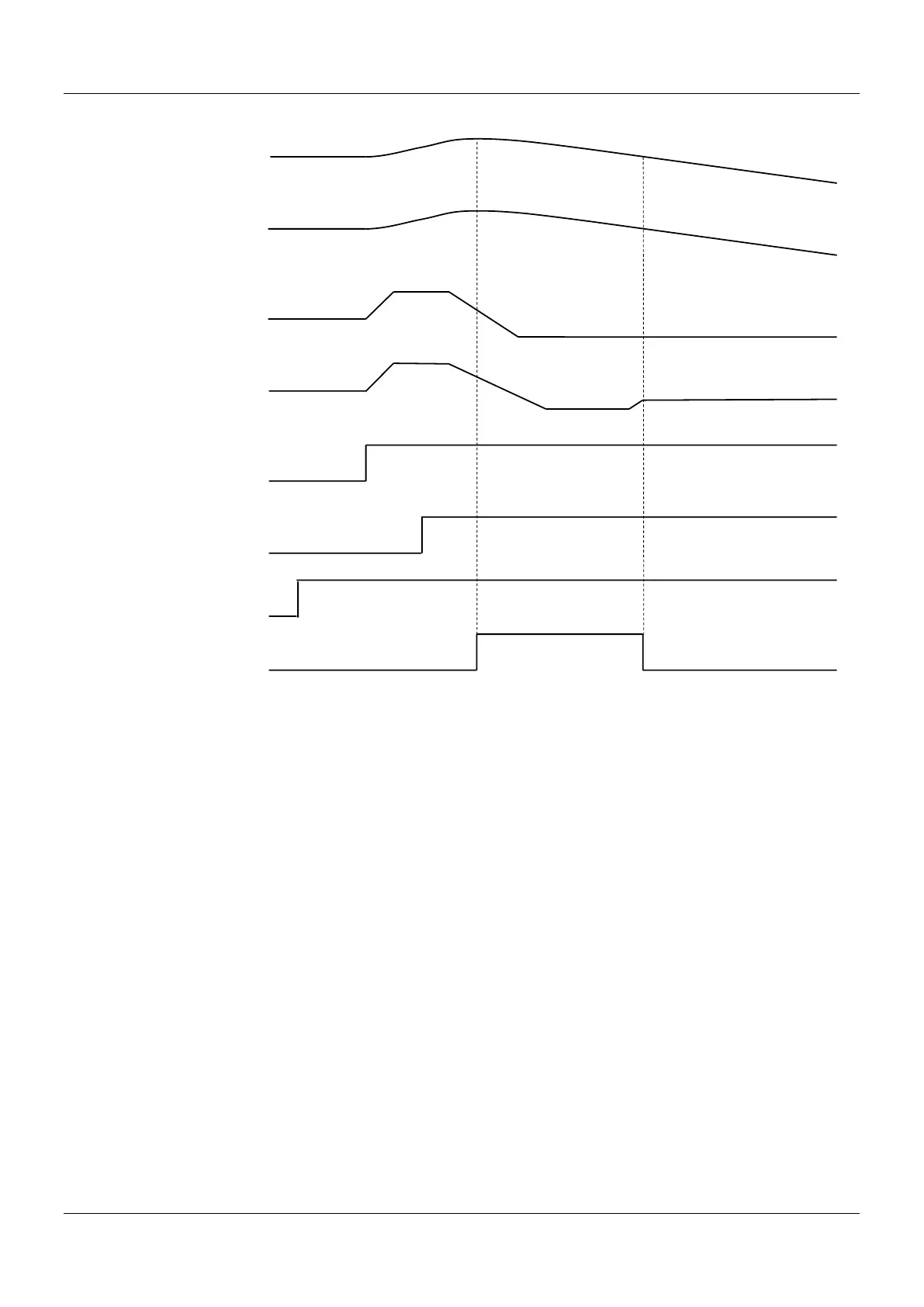
1. Run the SMC_BacklashCompensation first, then move forward, and then reverse to observe the backlash
compensation.
2. Since the SMC_BACKLASH_MODE is set to SMC_BL_AUTO and the SMC_BACKLASH_STARTSTATE is
set to SMC_BL_START_POSITIVE, the slave axis will not be compensationd at start-up.
3. The MC_MoveVelocity_0 is performed first, at which point the forward movement is carried out, and since the
positive traction force is applied to the slave axis by the master axis at the beginning, there is no need for
backlash compensation.
4. And then immediately run the MC_MoveVelocity_1. The reverse movement begins. At this time, the backlash
affects the synchronization of the slave axis, so SMC_BacklashCompensation starts the backlash
compensation, and the function block will move 10 distances in reverse in advance at the command position
of the slave axis. After compensation, the actual master and slave axes are fully synchronized.
bCompensating is True during the period of backlash compensation
 Loading...
Loading...

