AX-Series Motion Controller Instructions Manual Chapter 2
441
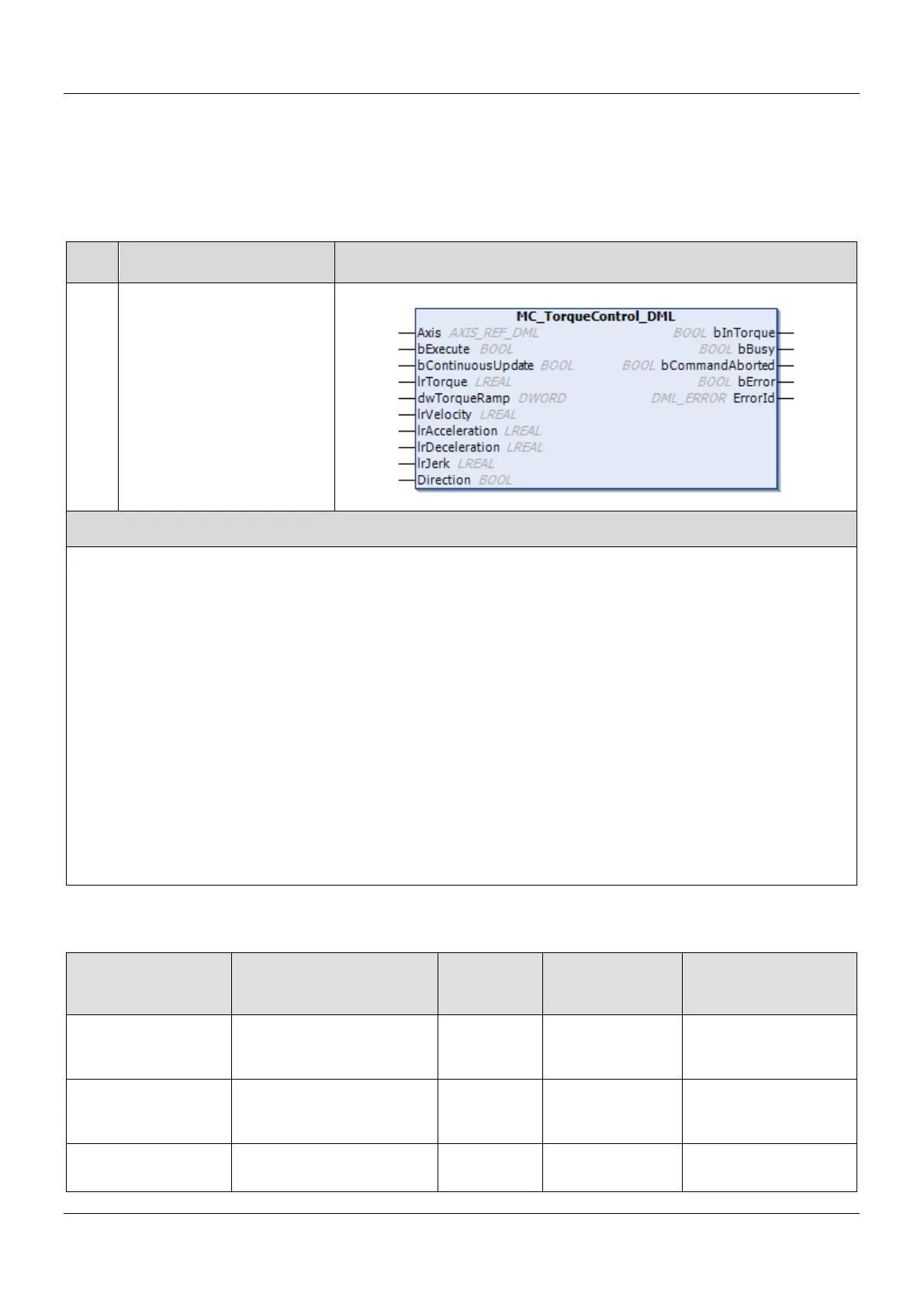
2.3.3.14 MC_TorqueControl_DML
Supported Devices: AX-308E, AX-364E
MC_TorqueControl_DML controls the torque by using the torque control mode of the applied servo drive.
FB/FC Instruction Graphic Expression
FB MC_TorqueControl
ST Language
MC_TorqueControl_DML_instance(
Axis : =,
bExecute : =,
bContinuousUpdate : =,
lrTorque : =,
dwTorqueRamp : =,
lrVelocity : =,
lrAcceleration : =,
lrDeceleration : =,
lrJerk : =,
Direction : =,
bInTorque =>,
bBusy =>,
bCommandAborted =>,
bError =>,
Inputs
Name Function Data Type
Setting Value
Timing to Take Effect
bExecute
The instruction is run when
bExecute turns from False to
True.
BOOL
True/False
(False)
-
bContinuousUpdate
Continuously updates the
target torque when
Continuousupdate is True.
BOOL
True/False
(False)
When bExecute turns to
True and Busy is False.
lrTorque
Specify the target torque.
LREAL
Positive, negative
When bExecute turns to
 Loading...
Loading...

