AX-Series Motion Controller Instructions Manual Chapter 2
275
bSignalDOG DOG signal BOOL
True/False
(False)
When bExecute turns to
True and bBusy is False.
bSignalZ Z signal BOOL
True/False
(False)
When bExecute turns to
True and bBusy is False.
byHomeMethod
*
Homing mode BYTE
Positive (0)
When bExecute turns to
wSearchSwitchSpeed
First-phase speed
(homing speed when
searching for a switch)
WORD
Positive (0) When bExecute turns to
True and bBusy is False.
wSearchZeroSpeed
Second-phase speed
(homing speed when
searching for zero)
WORD
Positive (0) When bExecute turns to
True and bBusy is False.
wHomeAcceleration Homing acceleration WORD
Positive (0)
When bExecute turns to
wHomeDeceleration
Homing deceleration
(Reserved)
WORD - -
*Note: Refer to A.4DMC_Home_P
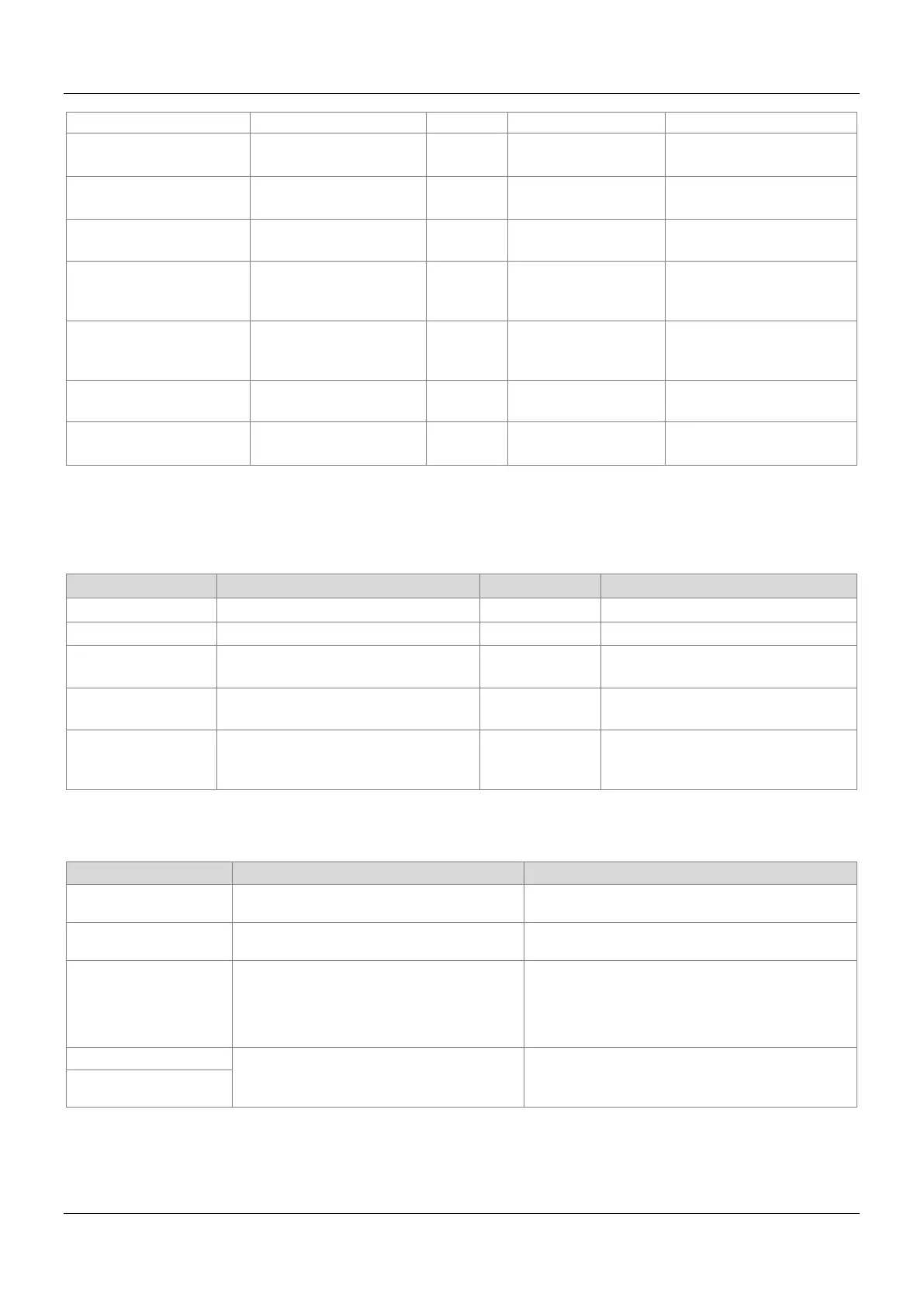
Outputs
Name
Function
Data Type
Setting Value (Default Value)
bDone True when homing is completed. BOOL True/False (False)
bBusy True when the instruction is enabled. BOOL True/False (False)
bCommandAborted
True when the instruction execution is
BOOL True/False (False)
bError
True when an error occurs in execution
of the instruction.
BOOL True/False (False)
ErrorID
Record the error code when an error
occurs. Refer to Appendix for error
DMC_ERROR
*
DMC_ERROR(DMC_NO_ERROR)
*Note: DMC_ERROR: Enumeration (Enum)
Output Update Timing
Timing for shifting to True
Timing for shifting to False
bDone True when homing is completed.
bExecute
When bError turns to True.
bBusy When bExecute turns to TRUE.
When bExecute turns to False.
When bError turns to True.
bCommandAborted
When the instruction is interrupted by
MC_Stop.
When bExecute turns to False.
When bExecute is False but
bCommandAborted turns to True,
bCommandAborted will remain True for one
cycle and then change to False.
bError When an error occurs in the execution
conditions or input values of the
instruction.
When bExecute turns to False. (Error Code is
cleared)
ErrorID
Timing Diagram
 Loading...
Loading...

