AX-Series Motion Controller Instructions Manual Chapter 2
357
Name Function Data Type
Output range
bError True when an error occurs. BOOL True/False (False)
ErrorID
When a command error occurs, record
the error code. For the detailed
description of the error code, refer to the
DMC_ERROR*
1
DMC_ERROR(DMC_NO_ERROR)
*Note: DMC_ERROR: Enumeration (Enum)
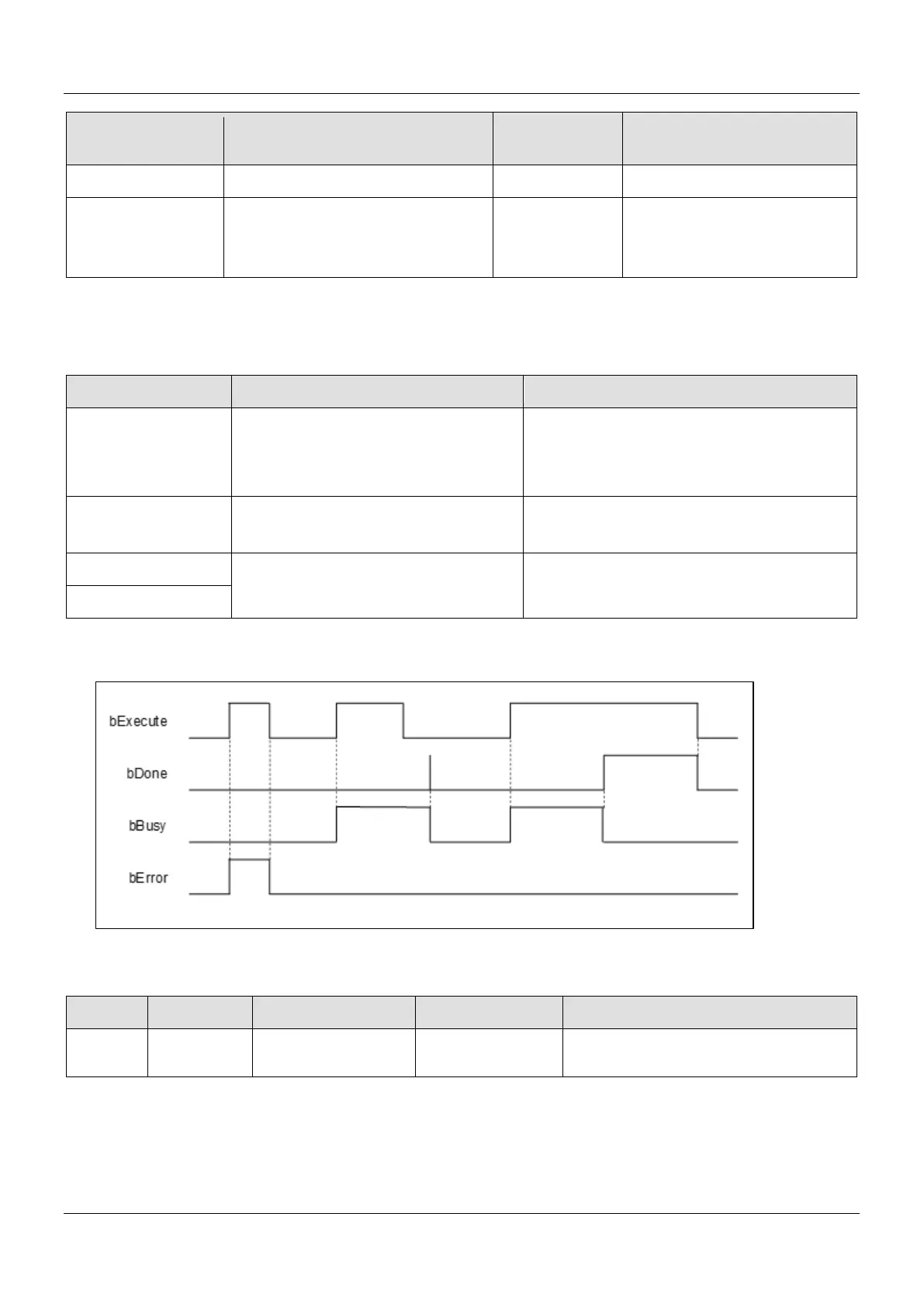
Output Update Timing
Timing for shifting to True
Timing for shifting to False
bDone
• When the setting is completed.
When bExecute turns to False.
• bDone will change to False after remaining
True for one period when bExecute is False
but bDone changes to True.
bBusy
• When bExecute turns to True.
When bDone turns to True.
•
When bError turns to True.
When an error occurs in the execution
conditions or input values for the
instruction.
• When bExecute turns from True to False.
(Error code is cleared.)
ErrorID
Timing Diagram
Inputs/Outputs
Axis
Specify the
AXIS_REF_SM3* AXIS_REF_SM3 When bExecute turns to True.
*Note: AXIS_REF_SM3 (FB): The interface is built in every function block and works as the starting program of the function
block.
Function
 Loading...
Loading...

