AX-Series Motion Controller Instructions Manual Chapter 2
84
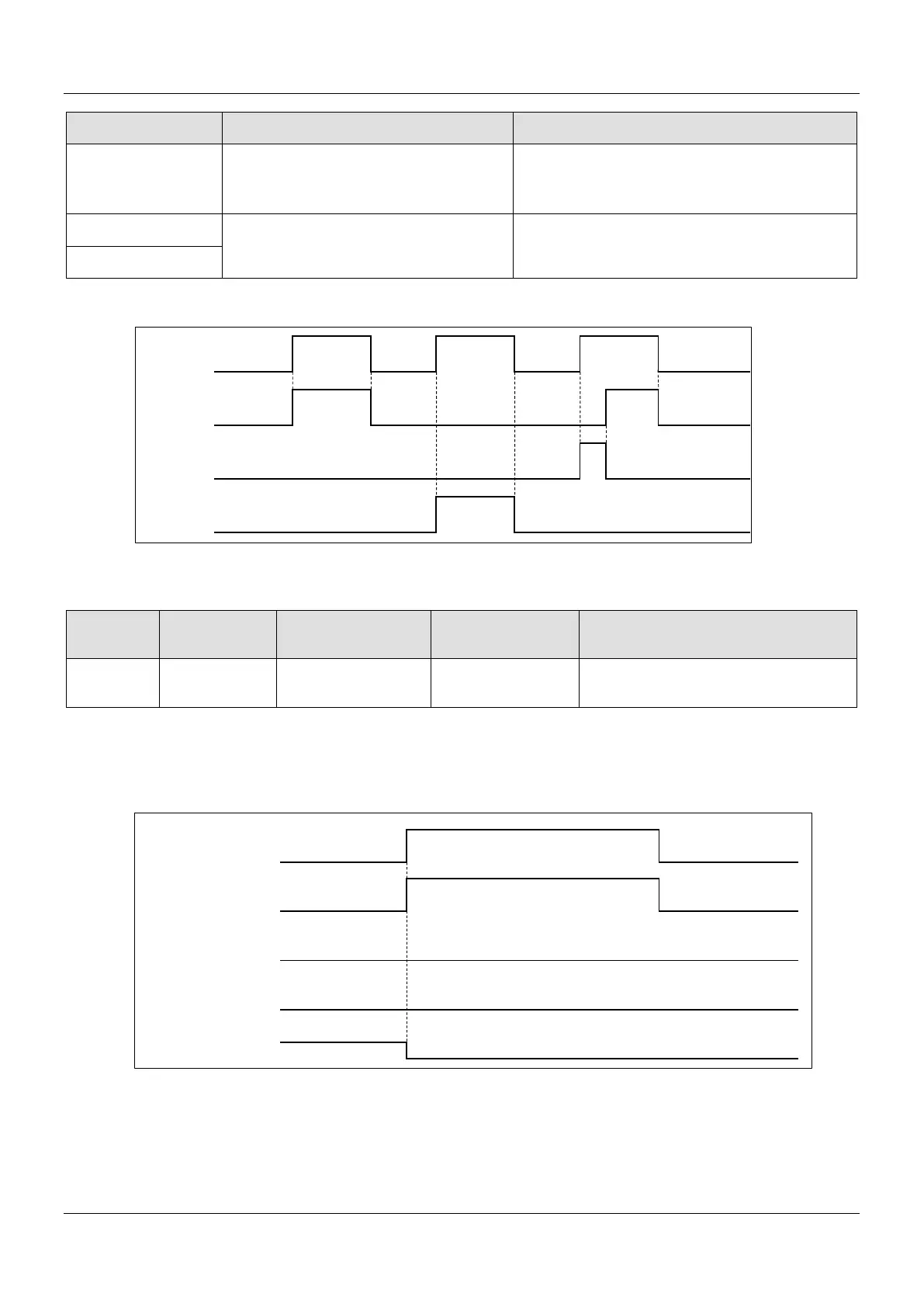
Name Timing for Shifting to True Timing for Shifting to False
Busy When Execute changes to True.
When Done turns to True.
When Error turns to True.
Error When an error occurs in the execution
conditions or input values for the
instruction. (Error Code is recorded)
When Execute turns from True to False. (Error
Code is cleared)
ErrorID
Timing Diagram
Inputs/Outputs
Name Function Data Type
Setting Value
(Default Value)
Timing to Take Effect
Slave
Specify the
AXIS_REF_SM3* AXIS_REF_SM3
When Execute turns to True and Busy is
*Note: AXIS_REF_SM3(FB): Every function block contains this variable, which works as the starting program for function blocks.
Function
After the gear relationship is disconnected, the slave axis will keep moving at the speed where the gear is
disconnected. The axis will be in ContinuousMotion (it has nothing to do with the axis velocity).
When the slave axis is out of sync and the velocity is zero, the status will be continuous_motion and remain
unchanged.
The sequence for execution of the instructions related to electronic gear.
 Loading...
Loading...

