E1 Series Servo Drive User Manual Application Function
8-60 HIWIN MIKROSYSTEM CORP.
External torque limit
External torque limit is enabled by forward external torque limit input (P-CL) signal and reverse
external torque limit input (N-CL) signal. P-CL and N-CL signals can be reallocated to other input
pins by Pt50B = t.X and t.X.
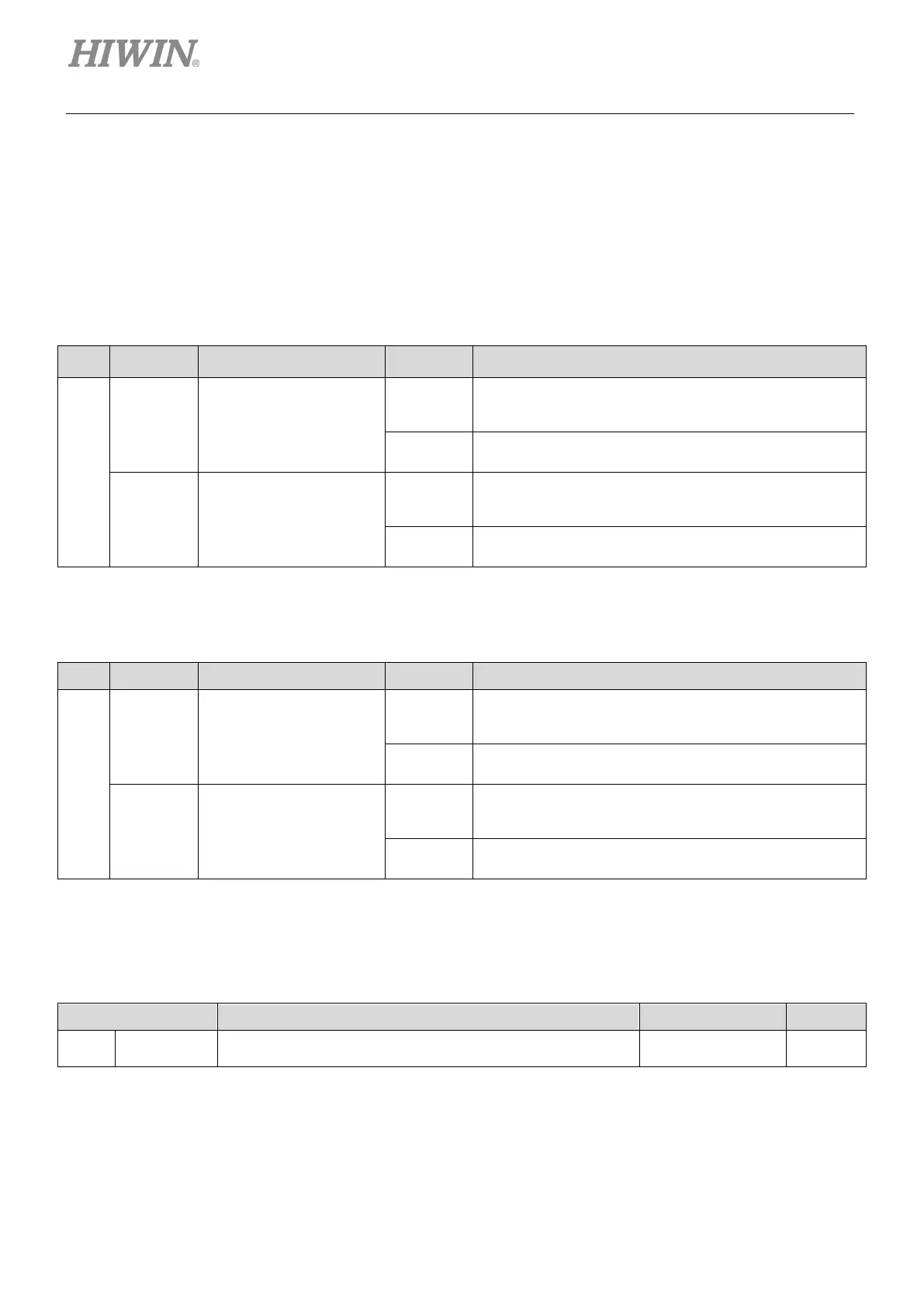
(1) Rotary servo motor
Table8.10.4.2
Type Signal Hardware Pin Status Description
Input
P-CL
CN6-26
(Default)
ON
When P-CL signal is ON, the smallest value of analog
command, Pt402 and Pt404 will be used as the torque
OFF
When P-CL signal is OFF, the value of Pt402 will be
used as the torque limit value.
N-CL
CN6-32
(Default)
ON
When N-CL signal is ON, the smallest value of analog
command, Pt403 and Pt405 will be used as the torque
OFF
When N-CL signal is OFF, the value of Pt403 will be
used as the torque limit value.
(2) Linear servo motor
Table8.10.4.3
Type Signal Hardware Pin Status Description
Input
P-CL
CN6-26
(Default)
ON
When P-CL signal is ON, the smallest value of analog
command, Pt483 and Pt404 will be used as the torque
OFF
When P-CL signal is OFF, the value of Pt483 will be
used as the torque limit value.
N-CL
CN6-32
(Default)
ON
When N-CL signal is ON, the smallest value of analog
command, Pt484 and Pt405 will be used as the torque
OFF
When N-CL signal is OFF, the value of Pt484 will be
used as the torque limit value.
Limiting torque with external torque limit and analog command
Set Pt002 to t.
3. When P-CL or N-CL signal is ON, T-REF signal is used as torque limit.
Table8.10.4.4
Parameter Description Effective Category
Pt002 t.3
When P-CL or N-CL signal is ON, T-REF signal is used as
torque limit.
After power on Setup

 Loading...
Loading...


