E1 Series Servo Drive User Manual Application Function
HIWIN MIKROSYSTEM CORP. 8-61
Related parameters
The parameters used for limiting torque with external torque limit and analog command are as
below. To disable internal torque limit, set Pt402, Pt403, Pt483 and Pt484 to their maximum values.
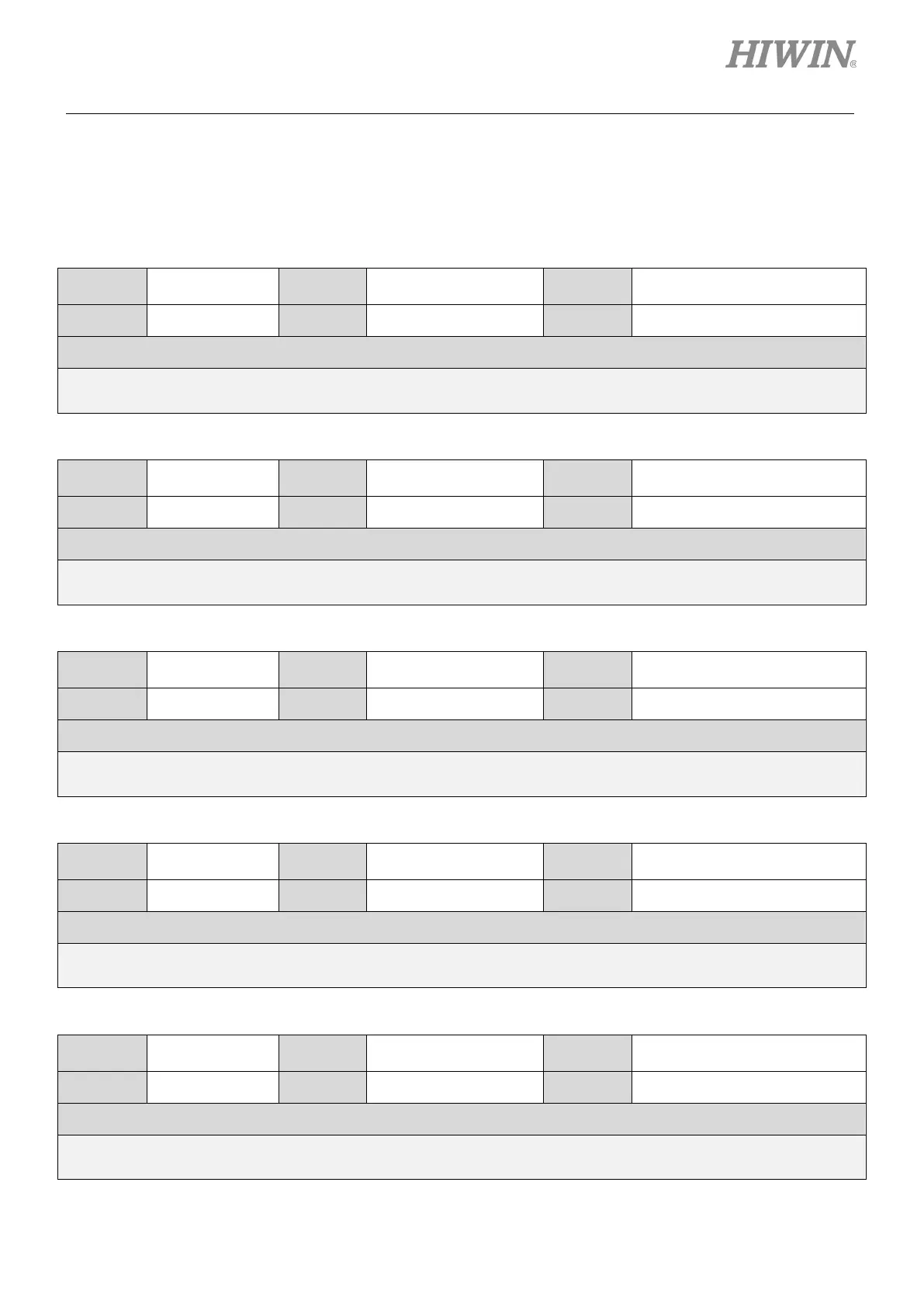
Table8.10.4.5
Parameter Pt400 Range 10~100
Position mode, velocity mode
and torque mode
Default 30 Effective Immediately Unit 0.1 V
Description
Set torque (force) command input gain.
Table8.10.4.6
Parameter Pt402 Range 0~800
Position mode, velocity mode
and torque mode
Default 800 Effective Immediately Unit 1%*
Description
Internal torque limit-torque limit value for forward direction
Table8.10.4.7
Parameter Pt403 Range 0~800
Position mode, velocity mode
and torque mode
Default 800 Effective Immediately Unit 1%*
Description
Internal torque limit-torque limit value for reverse direction
Table8.10.4.8
Parameter Pt404 Range 0~800
Position mode, velocity mode
and torque mode
Default 100 Effective Immediately Unit 1%*
Description
External torque limit-torque (force) limit value for forward direction
Table8.10.4.9
Parameter Pt405 Range 0~800
Position mode, velocity mode
and torque mode
Default 100 Effective Immediately Unit 1%*
Description
External torque limit-torque (force) limit value for reverse direction

 Loading...
Loading...


