E1 Series Servo Drive User Manual Application Function
HIWIN MIKROSYSTEM CORP. 8-75
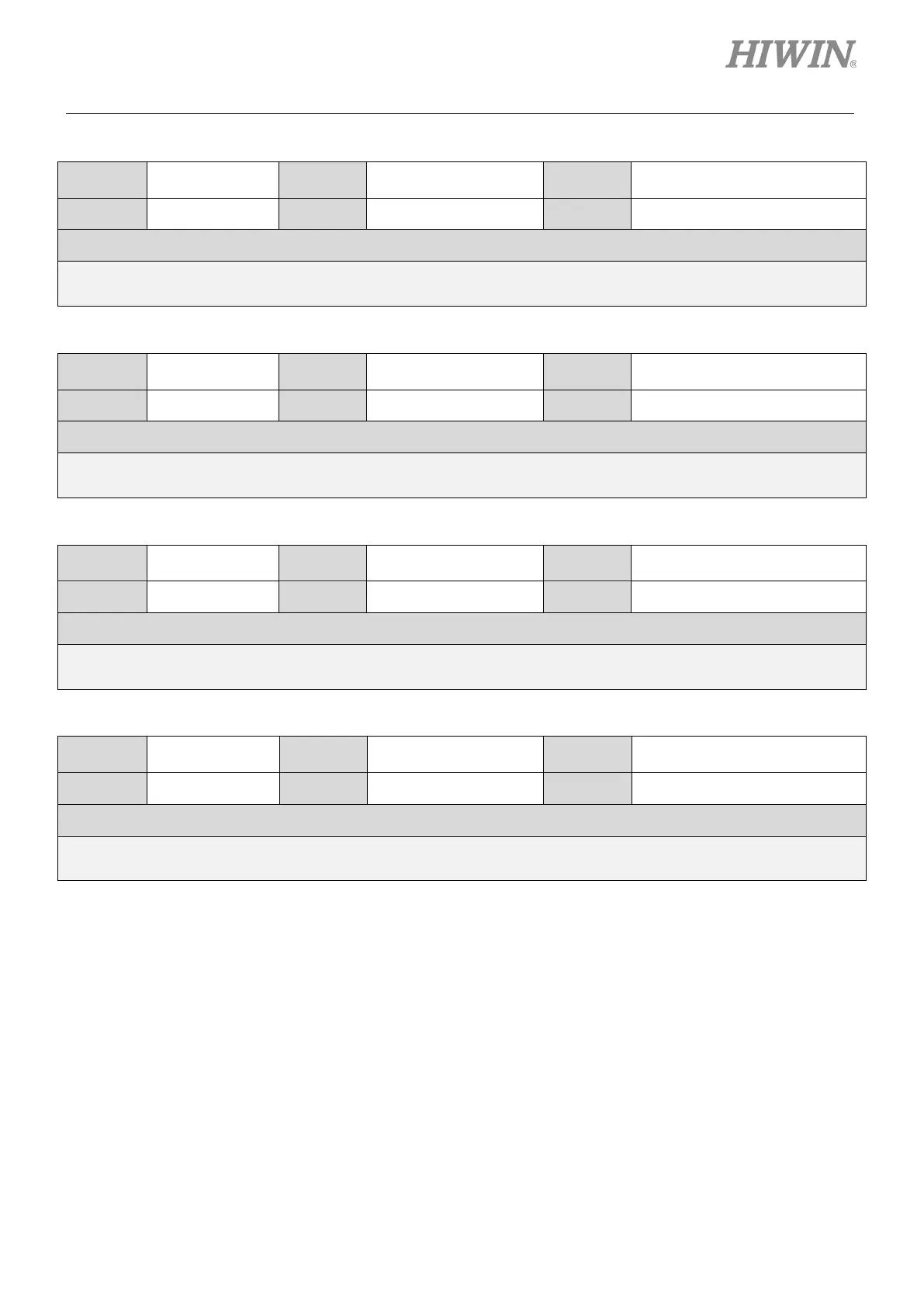
Table8.13.4
Parameter Pt231 Range 0~+2
30
-1
Position mode, velocity mode
and torque mode
Default 0 Effective Immediately Unit 1 control unit
Description
Set the output interval of position trigger function.
Table8.13.5
Parameter Pt232 Range -2
30
+1~+2
30
-1
Position mode, velocity mode
and torque mode
Default 0 Effective Immediately Unit 1 control unit
Description
Set the stop position of position trigger function.
Table8.13.6
Parameter Pt233 Range 0~4095
Position mode, velocity mode
and torque mode
Default 100 Effective After power on Unit 20 ns
Description
Set the pulse output width of position trigger function.
Table8.13.7
Parameter Pt234 Range 1~4000
Position mode, velocity mode
and torque mode
Default 1 Effective After power on Unit 0.25 ms
Description
Set the digital signal output width of position trigger function.
The enabling and disabling conditions of PT function
(1) Enabling conditions (All the following conditions must be satisfied.)
a. Use digital encoder.
b. Complete homing.
c. Enable position trigger function (Set X_PT_Enable to 1.).
(2) Disabling conditions (One of the following conditions must be satisfied.)
a. PT function is disabled automatically when the stop position (Pt232) is reached.
b. Disable position trigger function (Set X_PT_Enable to 0.).

 Loading...
Loading...


