E1 Series Servo Drive User Manual Tuning
10-26 HIWIN MIKROSYSTEM CORP.
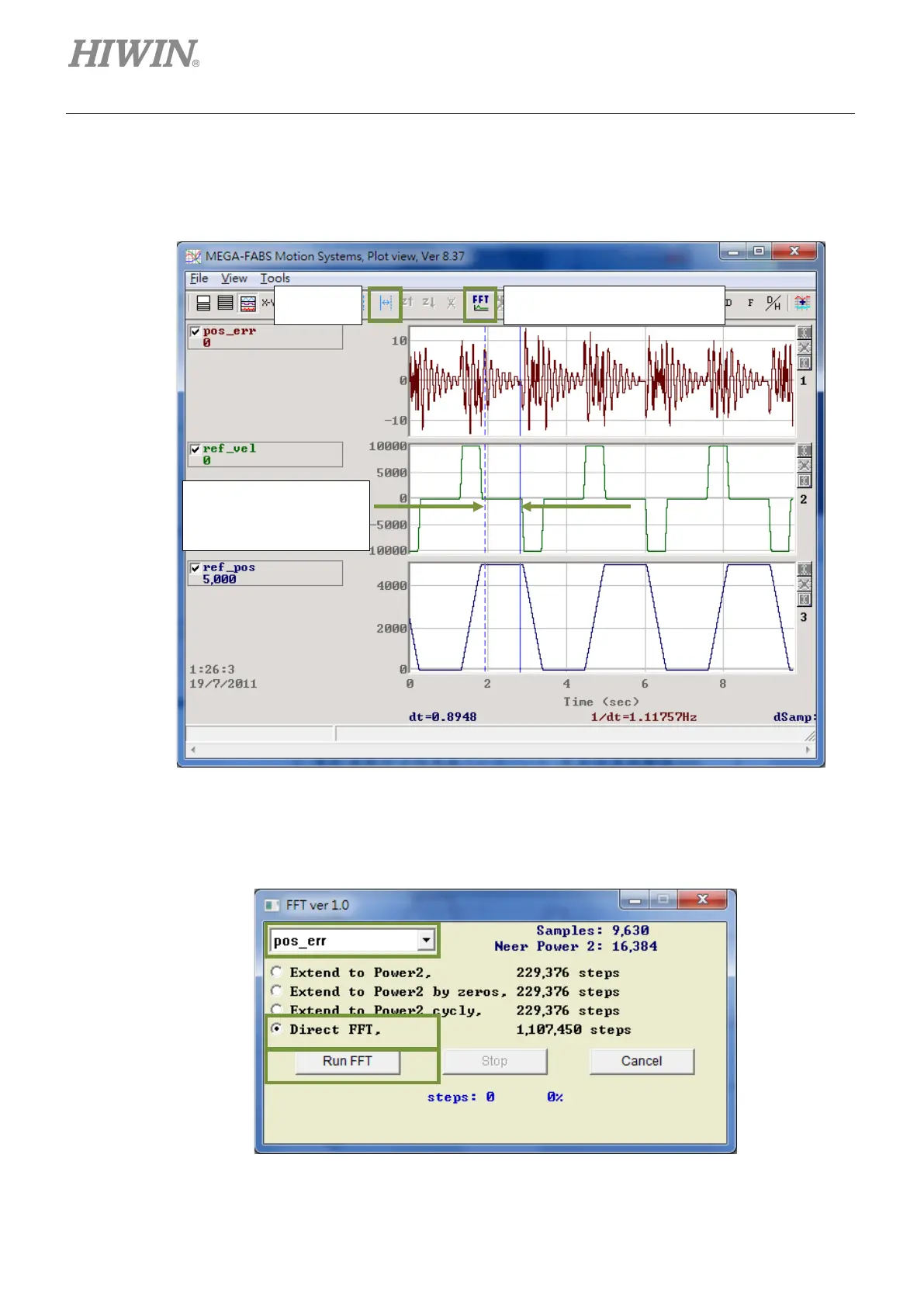
Step 4: Observe the waveform of reference velocity (X_vel_ff_int) during dwell time (The segment
when velocity command stops and starts) and enlarge the waveform of positon error
(X_pos_err). Select the range and click on the icon indicated in figure 10.6.4.1 to zoom in.
Figure10.6.4.1
Step 5: Click on the icon indicated in figure 10.6.4.1 to do fast Fourier transform of positon error
(X_pos_err).
Figure10.6.4.2
Right click and left click
on the waveform to
Zoom in Fast Fourier transform (FFT)

 Loading...
Loading...


