E1 Series Servo Drive User Manual Tuning
HIWIN MIKROSYSTEM CORP. 10-37
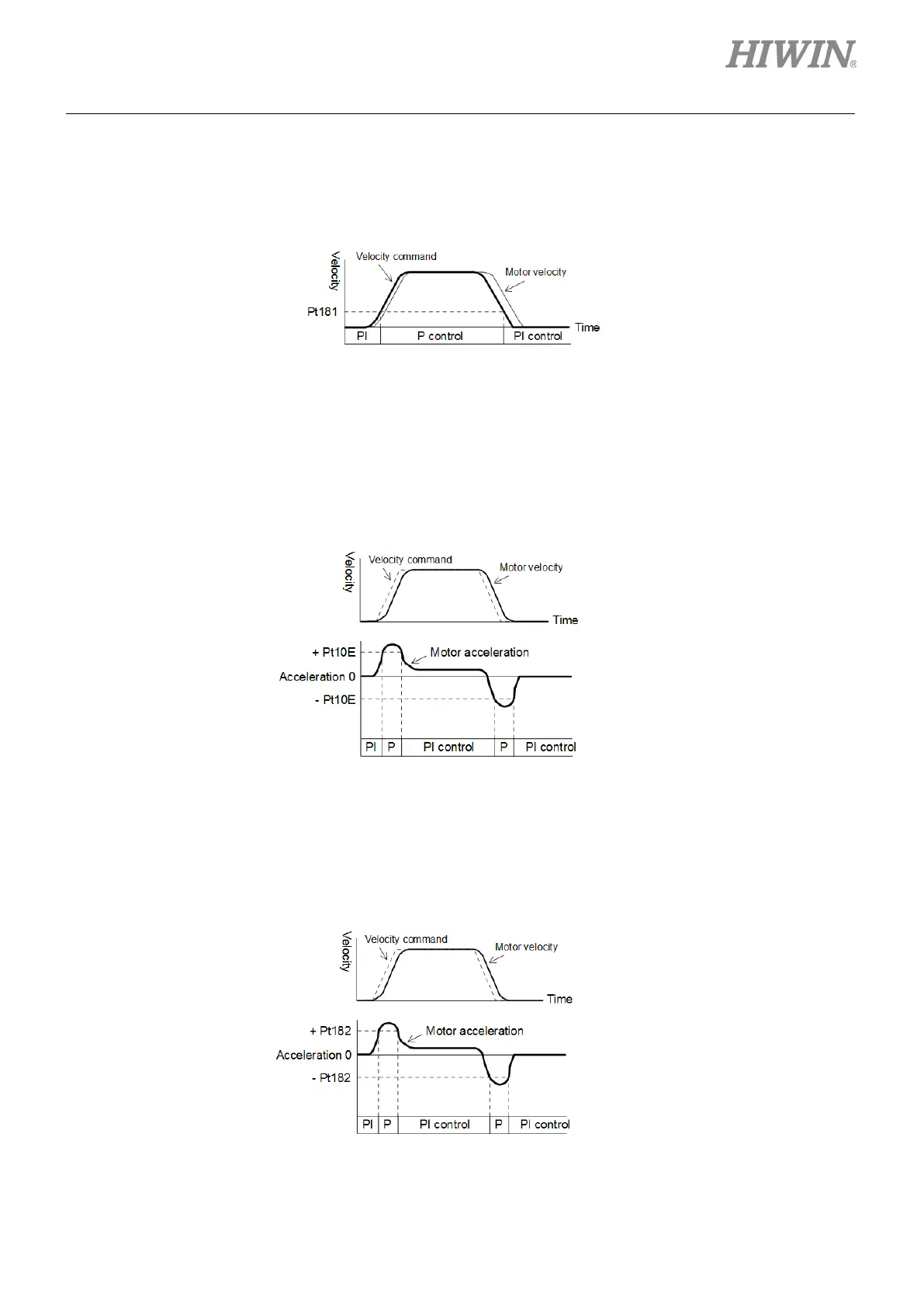
(2) Linear servo motor
If velocity command exceeds the velocity set in velocity command for mode switching (P/PI
mode) (Pt181), velocity loop is switched to P control.
Figure10.7.4.3
Use acceleration as P/PI mode switching condition
(1) Rotary servo motor
When acceleration exceeds the acceleration set in acceleration command for mode switching
(P/PI mode) (Pt10E), velocity loop is switched to P control.
Figure10.7.4.4
(2) Linear servo motor
When acceleration exceeds the acceleration set in acceleration command for mode switching
(P/PI mode) (Pt182), velocity loop is switched to P control.
Figure10.7.4.5

 Loading...
Loading...


