E1 Series Servo Drive User Manual Tuning
10-36 HIWIN MIKROSYSTEM CORP.
Table10.7.4.10
Parameter Pt182 Range 0~30000
Position mode and velocity
mode
Default 0 Effective Immediately Unit 1 mm/s
2
Description
Set mode switching (acceleration).
Table10.7.4.11
Parameter Pt10F Range 0~10000
Position mode
Default 0 Effective Immediately Unit 1 control unit
Description
Set P/PI mode switching (position deviation).
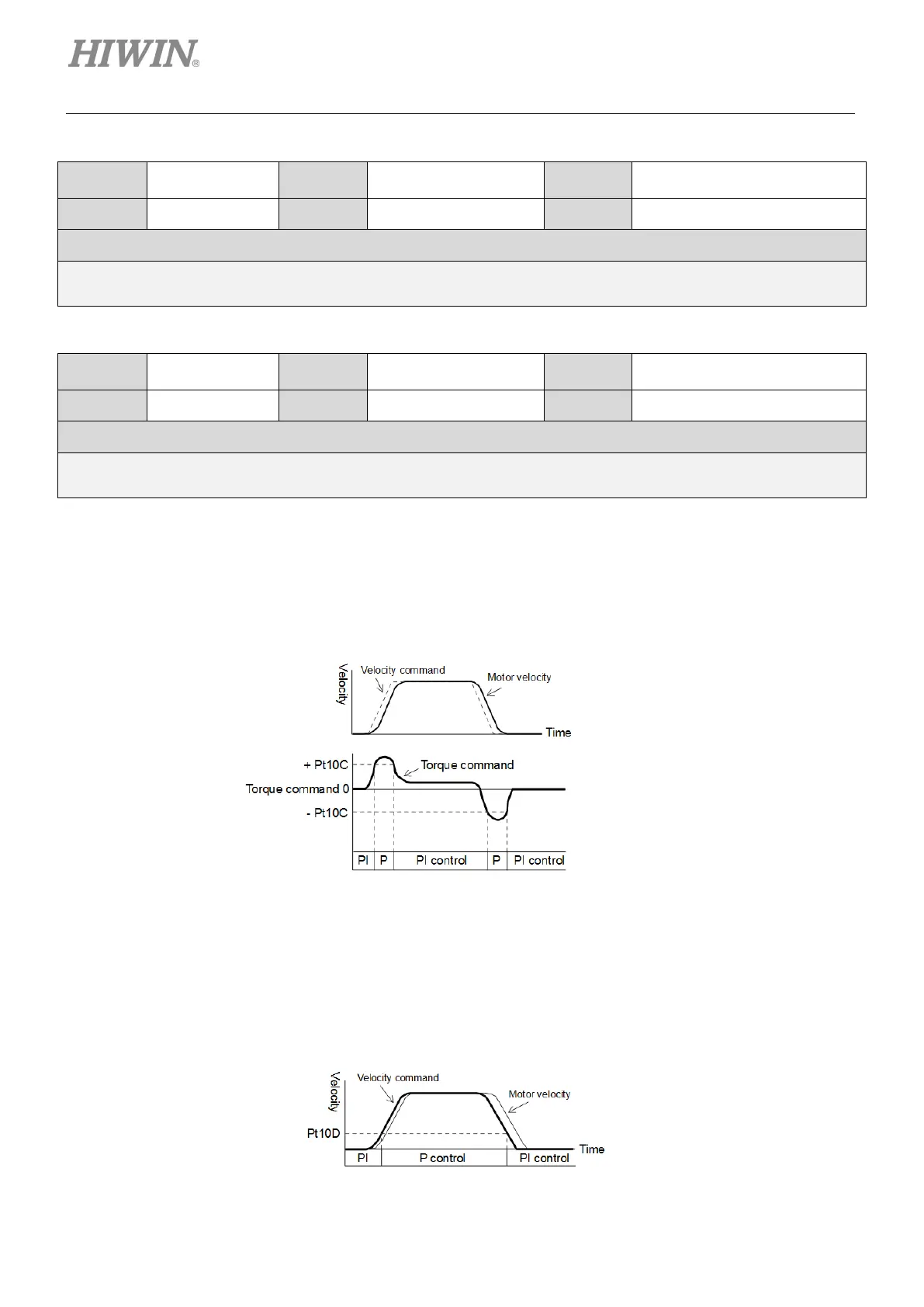
Use torque command as P/PI mode switching condition (Default)
When torque command exceeds the torque set in torque/force command for mode switching (P/PI
mode)(Pt10C), velocity loop is switched to P control. In default setting, the torque command value is
set to 200%.
Figure10.7.4.1
Use velocity command as P/PI mode switching condition
(1) Rotary servo motor
When velocity command exceeds the velocity set in velocity command for mode switching (P/PI
mode) (Pt10D), velocity loop is switched to P control.
Figure10.7.4.2

 Loading...
Loading...


