E1 Series Servo Drive User Manual Electrical Planning
HIWIN MIKROSYSTEM CORP. 5-27
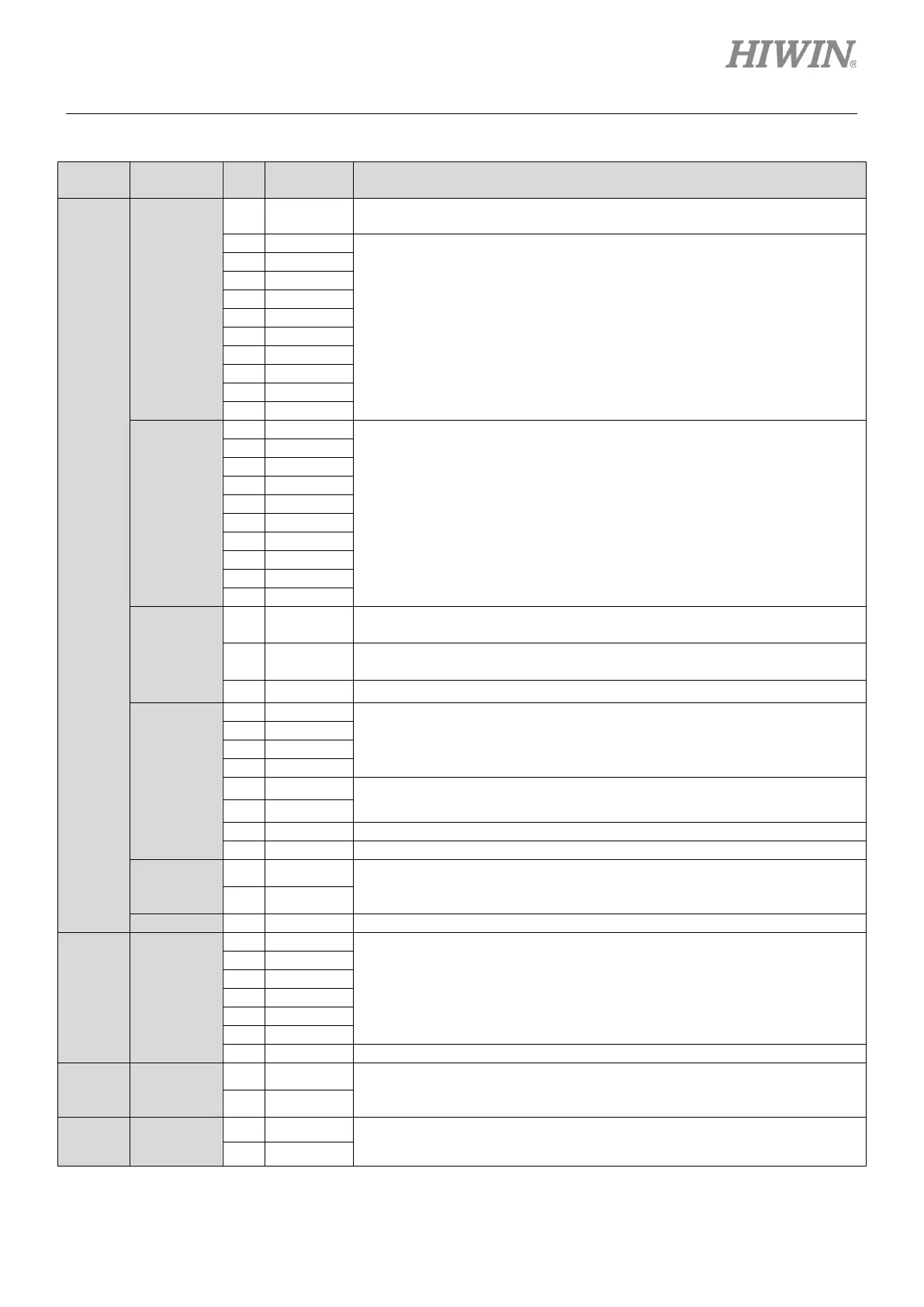
Table5.5.1.1 Pin definition of CN6-Standard
Category Pin Signal Function Description
All
Control
Modes
Digital
Input
7 COM
Common point for digital signal inputs
The wiring for digital signals must be sink or source type.
General-purpose input signals
Users are allowed to use the default setting in each control mode or
configure input functions by themselves, please refer to section 8.1.1.
Digital
Output
General-purpose output signals
Users are allowed to use the default setting in each control mode or
configure output functions by themselves, please refer to section 8.1.2.
Analog
Output
42 AO1
Analog output (+/-10 V)
Monitors motor torque.
43 AO2
Analog output (+/-10 V)
Monitors motor velocity.
Encoder
Output
Outputs pulse signals (Pulse type: AqB) according to the setting for
encoder output. For more information of encoder output setting, please
refer to section 8.6.
23 Z
Outputs one Z-phase signal per one revolution.
Outputs one Z-phase signal per one revolution (single-ended signal).
Special
Application
47 PT+
For the wiring for position trigger output function, please refer to section
5.5.3. Use Pt00E=t.X to enable or disable position trigger output
46 PT-
Position
Mode
Pulse
Input
Pulse command inputs
For the wirings for pulse command inputs, please refer to section 5.2.
Velocity
Mode
Analog
Input
14 V_REF+
Velocity command inputs (Input voltage +/-10 V)
For wiring diagram for velocity command, please refer to section 5.5.2.
(ED1-P servo drive is not supported.)
15 V_REF-
Torque
Mode
Analog
Input
16 T_REF+
Torque command inputs (Input voltage +/-10 V)
For wiring diagram for torque command, please refer to section 5.5.2.
17 T_REF-
 Loading...
Loading...



