In some special situations, if the roll diameter can be counted through thickness, the following
applications can be implemented:
5.5.20.2 Speed control
The detection feedback signal is needed in the closed-loop adjustment. PID calculation is carried out
according to the feedback signal for the motor speed regulation, linear speed, and stable tension
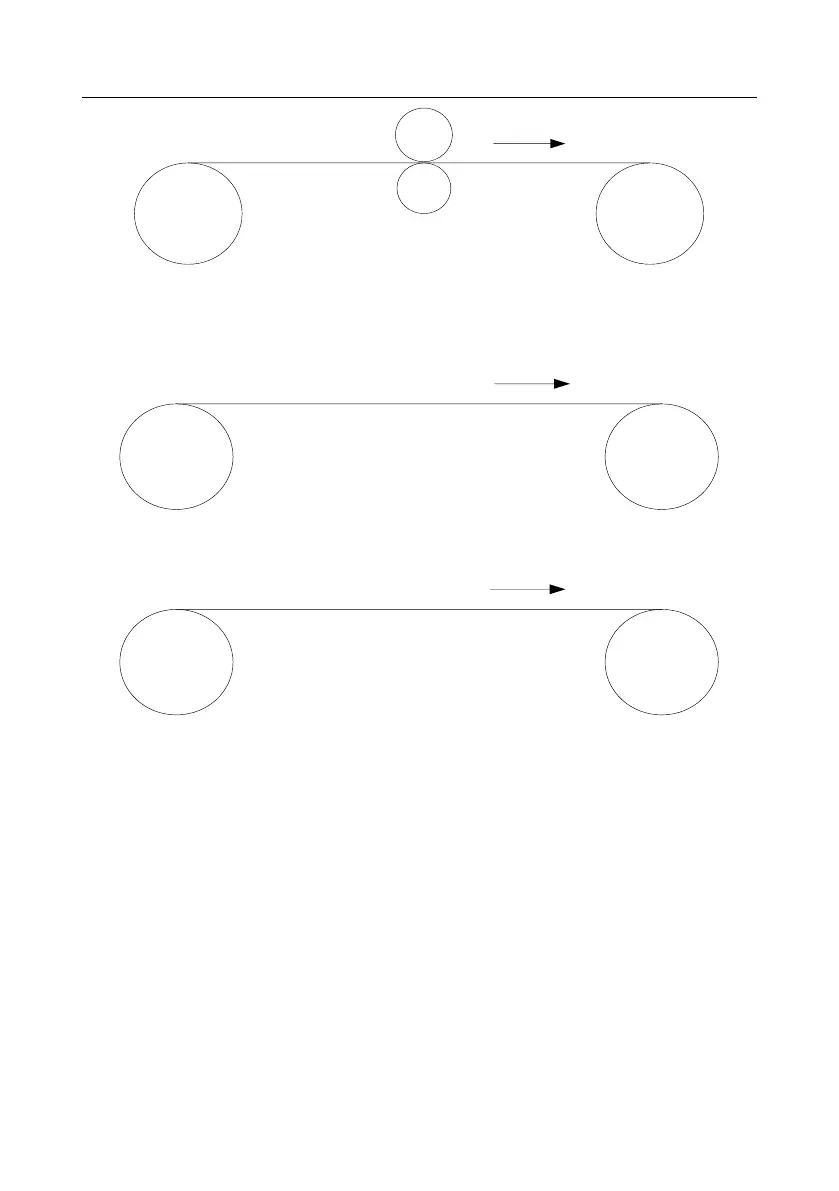
control. If the tension rocker or floating roller is used for feedback, changing the set value (PID
reference) may change the actual tension, and at the same time, changing the mechanical
configuration such as the tension rocker or floating roller weight can also change the tension.
The control principle is as follows.