HD2 Series Inverter Function Parameter List
-148-
of the motor whose running frequency is below
30Hz.
2: Frequency-variable motor (without low-speed
compensation). As the cooling effect of
frequency-variable motor is not affected by the
rotating speed, there is no need to adjust the
protection value during low-speed running.
Overload
protection
coefficient of
motor 1
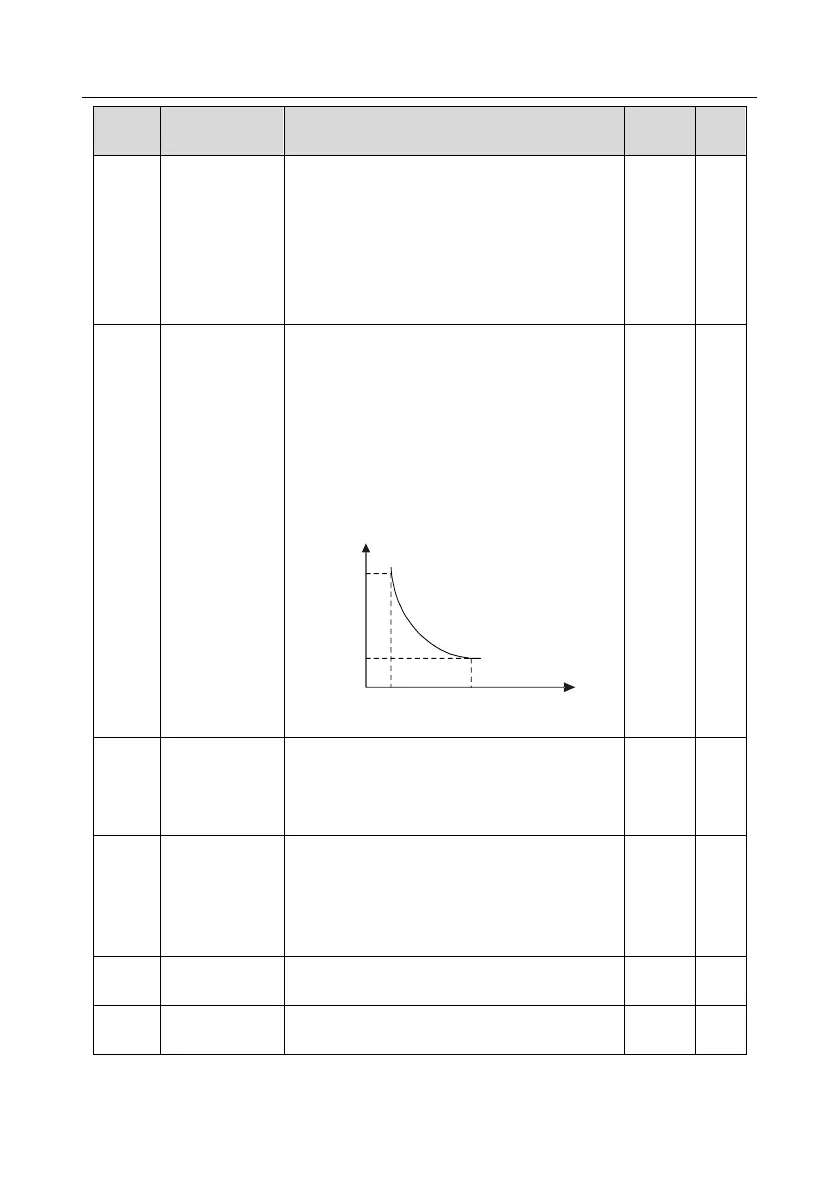
Motor overload multiples M=Iout/(In×K)
In is rated motor current, lout is inverter output
current, K is motor overload protection coefficient.
The smaller the K, the larger the value of M, and
the easier the protection.
M=116%: protection will be applied when motor
overloads for 1h; M=200%: protection will be
applied when motor overloads for 60s; M>=400%:
protection will be applied immediately.
1m
1h
116
%
200%
Time t
Motor overload multiple
Setting range: 20.0%–120.0%
Power display
calibration
coefficient of
motor 1
This function adjusts the power display value of
motor 1 only, and it does not affect the control
performance of the inverter.
Setting range: 0.00–3.00
Parameter
display of motor 1
0: Display as per motor type; under this mode, only
parameters related to current motor type will be
displayed.
1: Display all; under this mode, all the motor
parameters will be displayed.
System inertia of
motor 1