HD2 Series Inverter Function Parameter List
-176-
26: Rotational speed (bipolar, 0–Speed
corresponding to max. output frequency)
27: Value 2 set through
EtherCAT/PROFINET/EtherNet IP communication
(0–1000)
28: AO1 from the programmable card (0–1000)
29: AO2 from the programmable card (0–1000)
30: Rotational speed (0–Twice the motor rated
synchronous speed)
31: Output torque (Actual value, 0–Twice the
motor rated torque)
32: AI/AO temperature detection output
33–63: Reserved
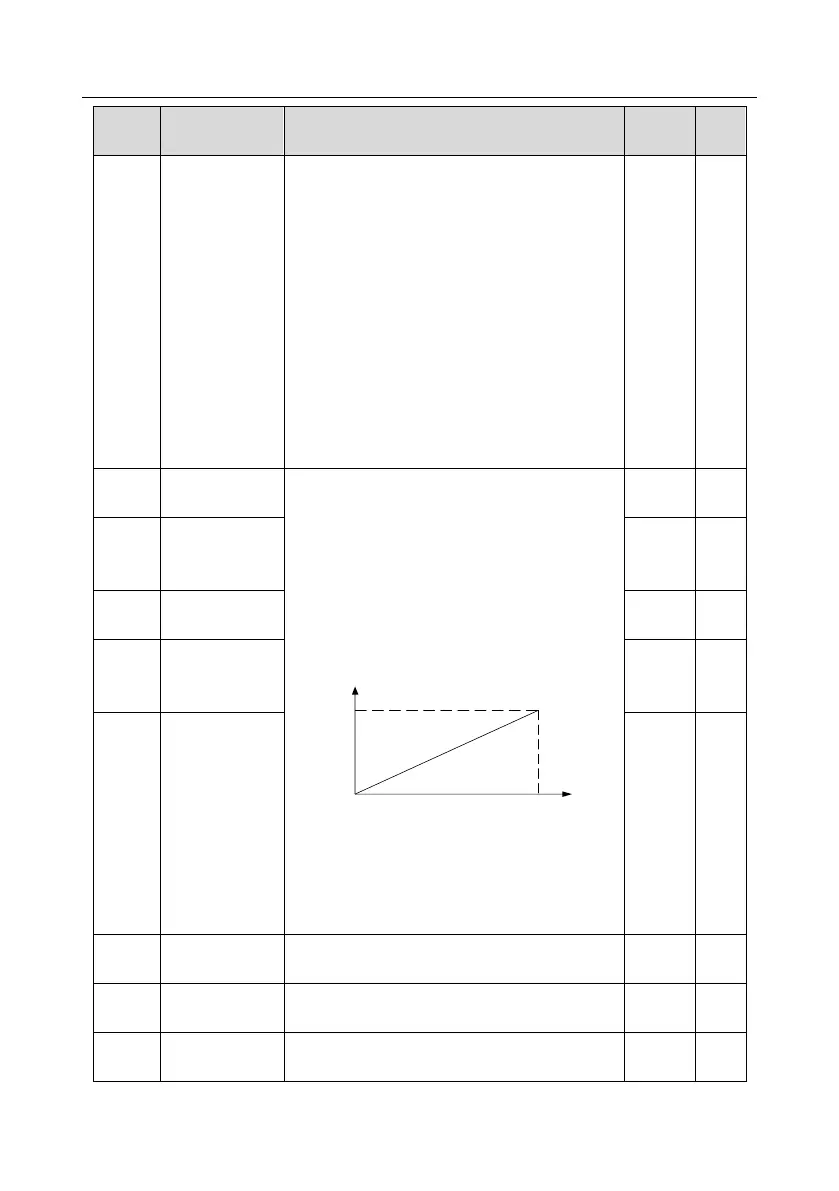
Lower limit of
AO1 output
Above function codes define the relation between
output value and analog output. When the output
value exceeds the set max./min. output range, the
upper/low limit of output will be adopted during
calculation.
When analog output is current output, 1mA
corresponds to 0.5V voltage. In different
applications, 100% of output value corresponds to
different analog outputs.
Setting range of P06.17: -300.0%–P06.19
Setting range of P06.18: 0.00V–10.00V
Setting range of P06.19: P06.17–300.0%
Setting range of P06.20: 0.00V–10.00V
Setting range of P06.21: 0.000s–10.000s
Corresponding
AO1 output of
lower limit
Upper limit of
AO1 output
Corresponding
AO1 output of
upper limit
Lower limit of
HDO output
Corresponding
HDO output of