HD2 Series Inverter Function Parameter List
-194-
regulate the precision and stability of PID system.
Setting range: 0.0–100.0%
Reference
Deviation
limit
Feedback
Output
frequency f
Time t
Time t
Upper limit value
of PID output
These two function codes are used to set the
upper/lower limit value of PID regulator.
100.0% corresponds to Max. output frequency
(P00.03) or max. voltage (P04.31)
Setting range of P09.09: P09.10–100.0%
Setting range of P09.10: -100.0%–P09.09
Lower limit value
of PID output
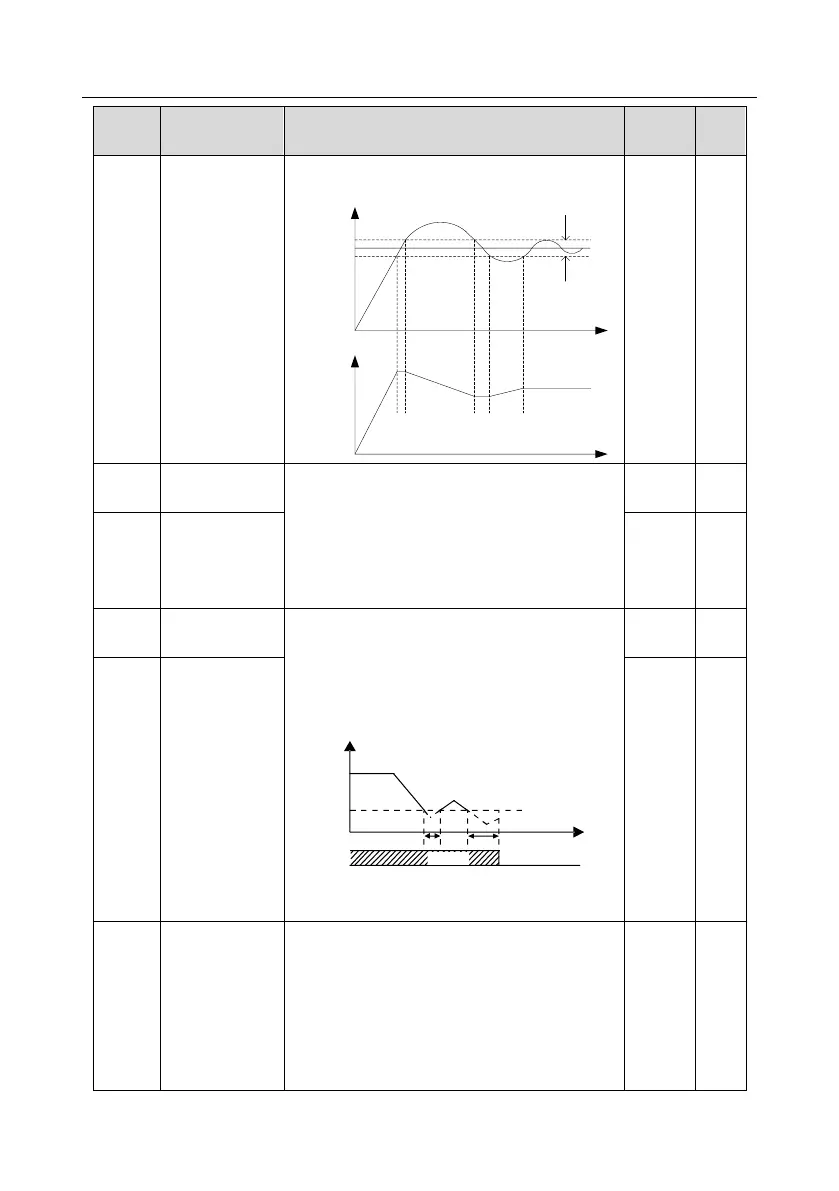
Feedback offline
detection value
Set PID feedback offline detection value, when the
detection value is no more than the feedback
offline detection value, and the duration exceeds
the value set in P09.12, the inverter will report "PID
feedback offline fault", and keypad displays PIDE.
T
Output frequency
t1 t2
P09.11
t1<T2, so the VFD
continues running
t2=P09.12
Running
Fault output PIDE
PIDE
Setting range of P09.11: 0.0–100.0%
Setting range of P09.12: 0.0–3600.0s
Feedback offline
detection time
0x0000–0x1111
Ones:
0: Continue integral control after the frequency
reaches upper/lower limit
1: Stop integral control after the frequency reaches
upper/lower limit
Tens: