M Series AC Servo
User Manual
123
Rev. 1.0
7/31/2019
400-820-9661
P-06 (KK) Inertia Feedforward Constant
Data Range Default Unit Data type
0~32767 800 ------ DEC
The servo control inertia feed forward gain. Gain value is relative:
“
0
”
meaning no gain,
“
32767
”
meaning full gain.
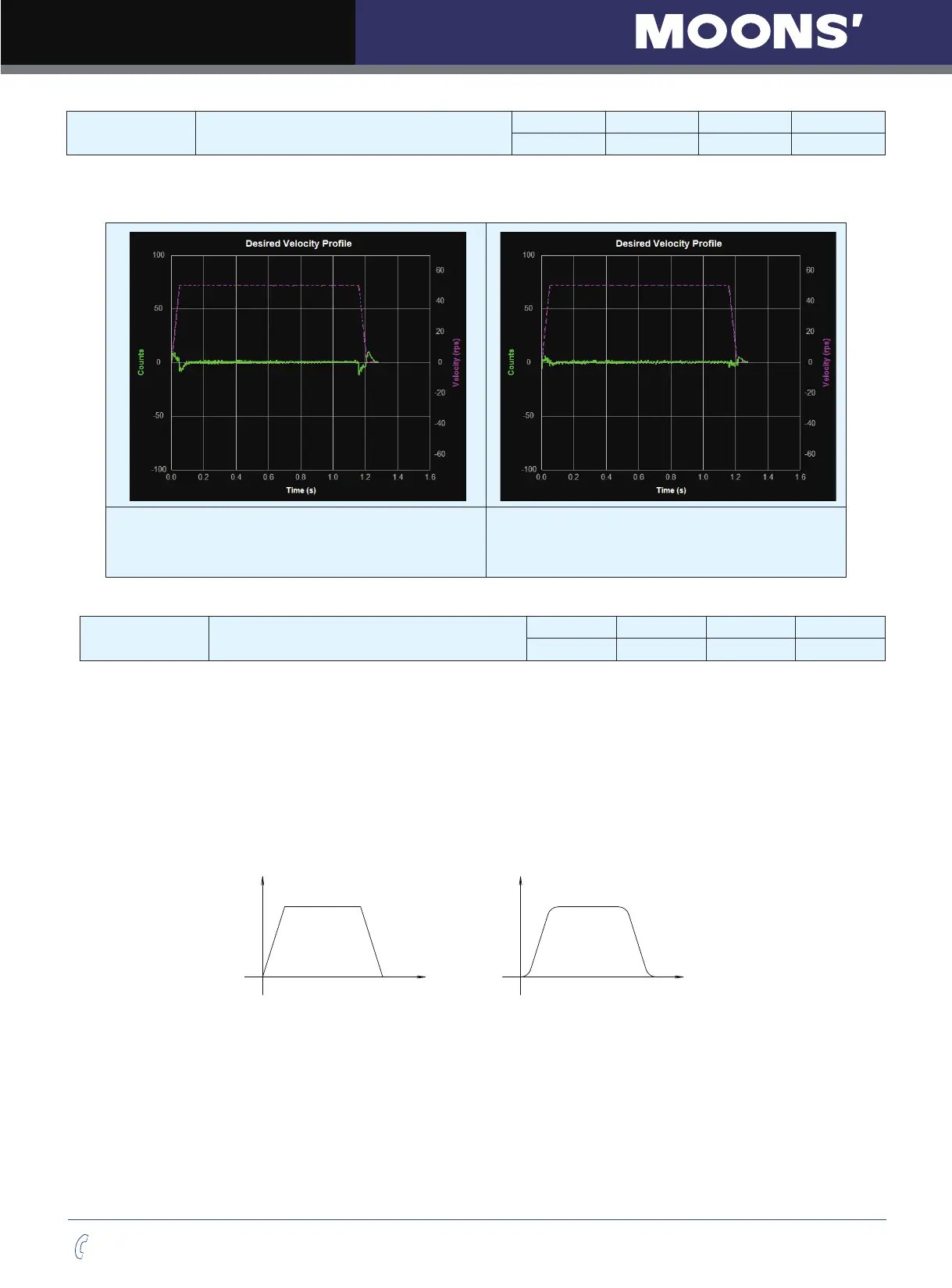
KK improves acceleration control by compensating for the load inertia.
Without KK parameter, Inertia Feedforward Constant.
Red Line (Dash) : Actual velocity
Green Line (Filled) : Position error
With KK parameter, Inertia Feedforward Constant.
Red Line (Dash) : Actual velocity
Green Line (Filled) : Position error
P-07 (KJ) Jerk Filter Frequency
Data Range Default Unit Data type
0~5000 5000 ------ DEC
This parameter sets the Jerk Filter frequency in Hz . The lower the frequency value the more pronounced the
S-curve profile will be. Setting the value to 0 will disable the filter.
S-curve acceleration/deceleration ramps are beneficial in positioning systems where instantaneous changes in
speed may cause the load to jerk excessively. One example is when the load is connected to the motion actuator
via a long moment arm. If the arm is not sufficiently rigid, changes in speed at the actuator can result in undesirable
oscillations and increased settling time at the load. Smoothed transitions in speed changes, can alleviate this
unwanted motion and reduce settling time.
Command
Time
Command
Time
Without Jerk Smoothing Filter With Jerk Smoothing Filter