Application Macros 5-15
690+ Series Frequency Inverter
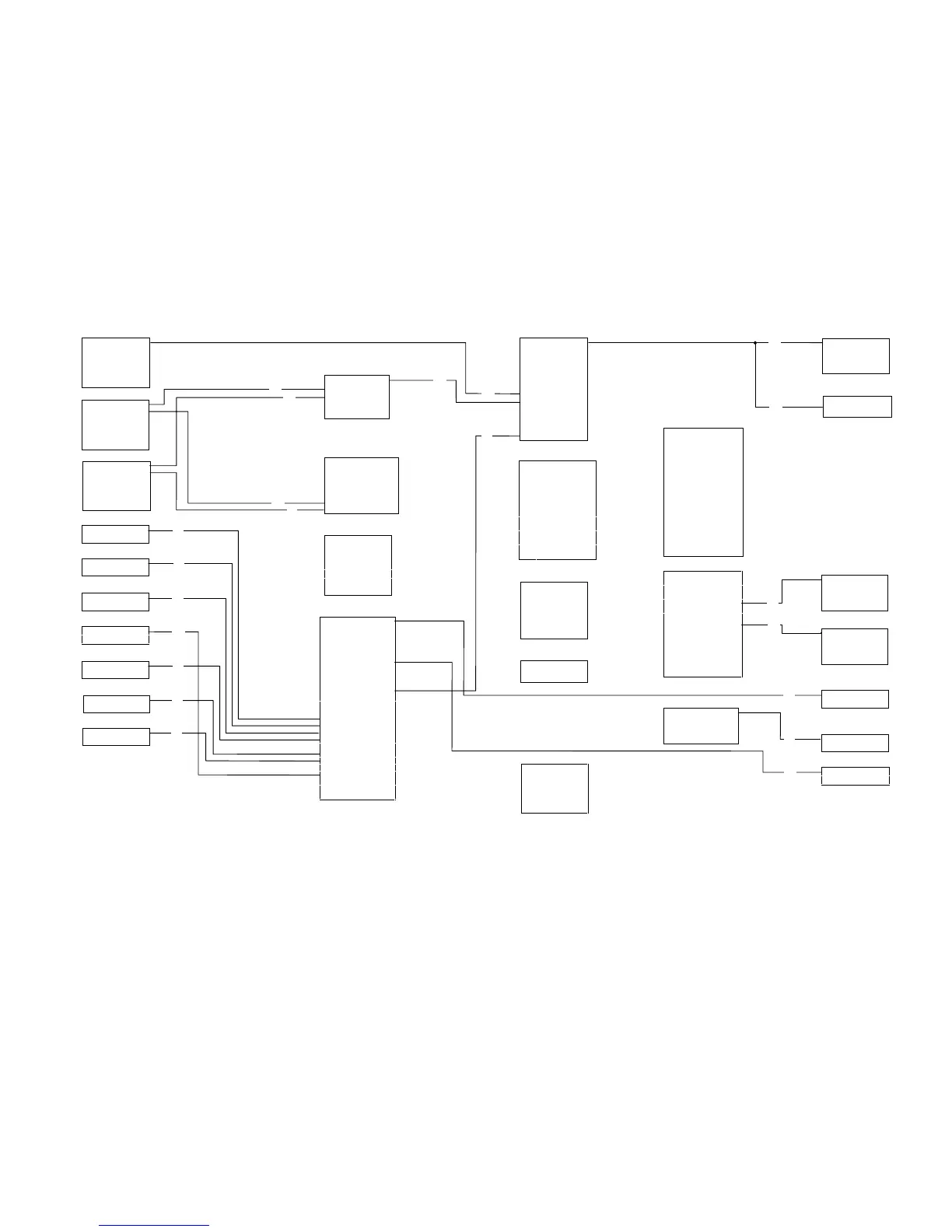
Sequencing Logic
–
TRIPPED [289]
–
FALSE
–
RUNNING [285]
–
FALSE
–
JOGGING [302]
–
FALSE
–
STOPPING [303]
–
FALSE
–
OUTPUT CONTACTOR [286]
–
FALSE
–
SWITCH ON ENABLE [288]
–
FALSE
– SWITCHED ON [306] – FALSE
–
READY [287]
–
FALSE
–
SYSTEM RESET [305]
–
FALSE
–
SEQUENCER STATE [301]
–
START DISABLED
–
REMOTE REV OUT [296]
–
FALSE
–
HEALTHY [274]
–
TRUE
–
FAN RUNNING [620]
–
FALSE
0.000s
–
[1686] START DELAY
–
FALSE
–
[291] RUN FORWARD
–
FALSE
–
[292] RUN REVERSE
–
FALSE
–
[293] NOT STOP
–
FALSE
–
[280] JOG
–
TRUE
–
[1235] CONTACTOR CLOSED
–
TRUE
–
[276] DRIVE ENABLE
–
TRUE – [277] NOT FAST STOP –
TRUE
–
[278] NOT COAST STOP
–
FALSE
–
[294] REMOTE REVERSE
–
FALSE
–
[282] REM TRIP RESET
–
TRUE
–
[290] TRIP RST BY RUN
–
FALSE
–
[283] POWER UP START
–
Digital Output 3
FALSE – [737] VALUE –
FALSE – [736] INVERT –
0.00 %
Reference
SPEED DEMAND [255] – 0.00 %
SPEED SETPOINT [254] – 0.00 %
REVERSE [256] – FALSE
LOCAL SETPOINT [247] – 0.00 %
LOCAL REVERSE [250] – FALSE
COMMS SETPOINT [770] – 0.00 %
– [245] REMOTE SETPOINT –
0.00 % – [248] SPEED TRIM –
110.00 % – [252] MAX SPEED CLAMP –
-110.00 % – [253] MIN SPEED CLAMP –
FALSE – [243] TRIM IN LOCAL –
FALSE – [249] REMOTE REVERSE –
Analog Input 1
– VALUE [ 16] – 0.00 %
– BREAK [ 18] – FALSE
100.00 % – [ 14] SCALE –
0.00 % – [ 15] OFFSET –
– [ 13] TYPE –
FALSE – [ 12] BREAK ENABLE –
0.00 % – [ 17] BREAK VALUE –
-10 .. 10 V
0.00 %
FALSE
Analog Input 3
– VALUE [715] –
– BREAK [717] –
100.00 % – [713] SCALE –
0.00 % – [714] OFFSET –
-10 .. 10 V
– [712] TYPE –
FALSE – [711] BREAK ENABLE –
0.00 % – [716] BREAK VALUE –
Analog Input 2
– VALUE [ 25] – 0.00 %
– BREAK [ 27] – FALSE
100.00 % – [ 23] SCALE –
0.00 % – [ 24] OFFSET –
– [ 22] TYPE –
FALSE – [ 21] BREAK ENABLE –
0.00 % – [ 26] BREAK VALUE –
-10 .. 10 V
I/O Trips
–
THERMIST [1155]
–
FALSE
–
ENCODER TB [1156]
–
FALSE
–
EXTERNAL [234]
–
FALSE
FALSE
–
[760] INVERT THERMIST
–
FALSE
–
[1154] INVERT ENC TRIP
–
COAST
–
[233] EXT TRIP MODE
–
FALSE
–
[235] INPUT 1 BREAK
–
FALSE
–
[236] INPUT 2 BREAK
–
Analog Input 4
– VALUE [722] – 0.00 %
– BREAK [724] – FALSE
100.00 % – [720] SCALE –
0.00 % – [721] OFFSET –
0..+10 V – [719] TYPE –
FALSE – [718] BREAK ENABLE –
0.00 % – [723] BREAK VALUE –
Analog Output 1
0.00 % – [ 45] VALUE –
100.00 % – [ 46] SCALE –
0.00 % – [ 47] OFFSET –
TRUE – [ 48] ABSOLUTE –
0..+10 V – [ 49] TYPE –
Analog Output 2
0.00 % – [731] VALUE –
100.00 % – [732] SCALE –
0.00 % – [733] OFFSET –
FALSE – [734] ABSOLUTE –
-10 .. +10 V – [735] TYPE –
Digital Input 1
VALUE [ 31] – FALSE
FALSE – [ 30] INVERT –
Digital Input 3
VALUE [ 37] – FALSE
FALSE – [ 36] INVERT –
Digital Input 5
VALUE [ 43] – FALSE
FALSE – [ 42] INVERT –
Digital Input 2
VALUE [ 34] – FALSE
FALSE – [ 33] INVERT –
Digital Input 4
VALUE [ 40] – FALSE
FALSE – [ 39] INVERT –
Digital Input 6
VALUE [726] – FALSE
FALSE – [725] INVERT –
Digital Input 7
VALUE [728] – FALSE
FALSE – [727] INVERT –
Digital Output 1
FALSE – [ 52] VALUE –
TRUE – [ 51] INVERT –
Digital Output 2
FALSE – [ 55] VALUE –
FALSE – [ 54] INVERT –
Reference Jog
10.00 % – [246] SETPOINT –
1.0 s – [261] ACCEL TIME –
1.0 s – [262] DECEL TIME –
Reference Stop
STOP RAMP – [279] RUN STOP MODE –
10.0 s – [263] STOP TIME –
0.10 % – [266] STOP ZERO SPEED –
0.500 s – [284] STOP DELAY –
RAMPED – [304] FAST STOP MODE –
30.0 s – [275] FAST STOP LIMIT –
0.1 s – [264] FAST STOP TIME –
1200 Hz/s – [126] FINAL STOP RATE –
Trips Status
ACTIVE TRIPS [ 4] – 0000
ACTIVE TRIPS+ [740] – 0000
WARNINGS [ 5] – 0000
WARNINGS+ [741] – 0000
FIRST TRIP [ 6] – NONE
0700 – [231] DISABLED TRIPS –
0040 – [742] DISABLED TRIPS+ –
Value Func 1
OUTPUT [133] – 0.00 %
0.00 % – [130] INPUT A –
0.00 % – [131] INPUT B –
0.00
– [132] INPUT C –
A+B+C – [134] TYPE –
Analog Output 3
0.00 % – [800] VALUE –
100.00 % – [801] SCALE –
0.00 % – [802] OFFSET –
FALSE – [803] ABSOLUTE –
– [804] TYPE –-10 .. +10 V
(4)
(12)
(13)
(16)
(5)
(6)
(7)
(9)
0.00 %
Setpoint Scale
– OUTPUT [ 59] – 0.0 Hz
– [ 58] INPUT –
** 1500 RPM – [1032] MAX SPEED –
(21)
(18)
Digital Input 8 = COAST STOP
Motor Data
** SENSORLESS VEC
– [1157] CONTROL MODE –
** 5.50 kW – [1158] POWER –
** 50.0 Hz – [1159] BASE FREQUENCY –
** 400.0 V – [1160] MOTOR VOLTAGE –
** 11.30 A – [ 64] MOTOR CURRENT –
** 3.39 A – [ 65] MAG CURRENT –
** 1445.0 rpm – [ 83] NAMEPLATE RPM –
** STAR – [124] MOTOR CONNECTION –
** 4 – [ 84] MOTOR POLES –
** 0.90 – [242] POWER FACTOR –
** 2.0 – [1164] OVERLOAD –
** 1.3625 Ohm – [119] STATOR RES –
** 43.37 mH – [120] LEAKAGE INDUC –
** 173.48 mH – [121] MUTUAL INDUC –
276.04 ms – [1163] ROTOR TIME CONST –
Feedbacks
– DC LINK VOLTS [ 75] – 0 V
– TERMINAL VOLTS [1020] – 0 V
– SPEED FEEDBACK RPM [569] – 0.00 rpm
– SPEED FEEDBACK HZ [568] – 0.00 Hz
– SPEED FEEDBACK % [749] – 0.00 %
– ENCODER FBK % [1238] – 0.00 %
– ENCODER COUNT [1016] – 0
– TORQUE FEEDBACK [ 70] – 0.00 %
– FIELD FEEDBACK [ 73] – 0.00 %
– MOTOR CURRENT % [ 66] – 0.00 %
– MOTOR CURRENT [ 67] – 0.0 A
** 10.0 V – [761] ENCODER SUPPLY –
** 2048 – [566] ENCODER LINES –
** FALSE – [567] ENCODER INVERT –
** FALSE – [ 50] QUADRATIC TORQUE –
Zero Speed
– AT ZERO SPD FBK [1233] – TRUE
– AT ZERO SPD DMD [360] – TRUE
– AT STANDSTILL [1234] – TRUE
0.00 % – [359] HYSTERISIS –
0.00 % – [357] THRESHOLD –
(15)
(3)
(2)
(1)
(19)
(8)
(10)
(14)
(20)
(17)
(11)
Reference Ramp
– RAMPING [698] – FALSE
LINEAR – [244] RAMP TYPE –
** 10.0 s
– [258] ACCEL TIME –
** 10.0 s
– [259] DECEL TIME –
FALSE – [268] SYMMETRIC MODE –
** 10.0 s
– [267] SYMMETRIC TIME –
10.00 /s^2 – [692] SRAMP ACCEL –
10.00 /s^2 – [693] SRAMP DECEL –
10.00 /s^3 – [694] SRAMP JERK 1 –
10.00 /s^3 – [695] SRAMP JERK 2 –
10.00 /s^3 – [696] SRAMP JERK 3 –
10.00 /s^3 – [697] SRAMP JERK 4 –
TRUE – [691] SRAMP CONTINUOUS –
FALSE – [260] HOLD –
Macro 6: “System” Drive

 Loading...
Loading...








