1-70 Programming Your Application
690+ Series Frequency Inverter
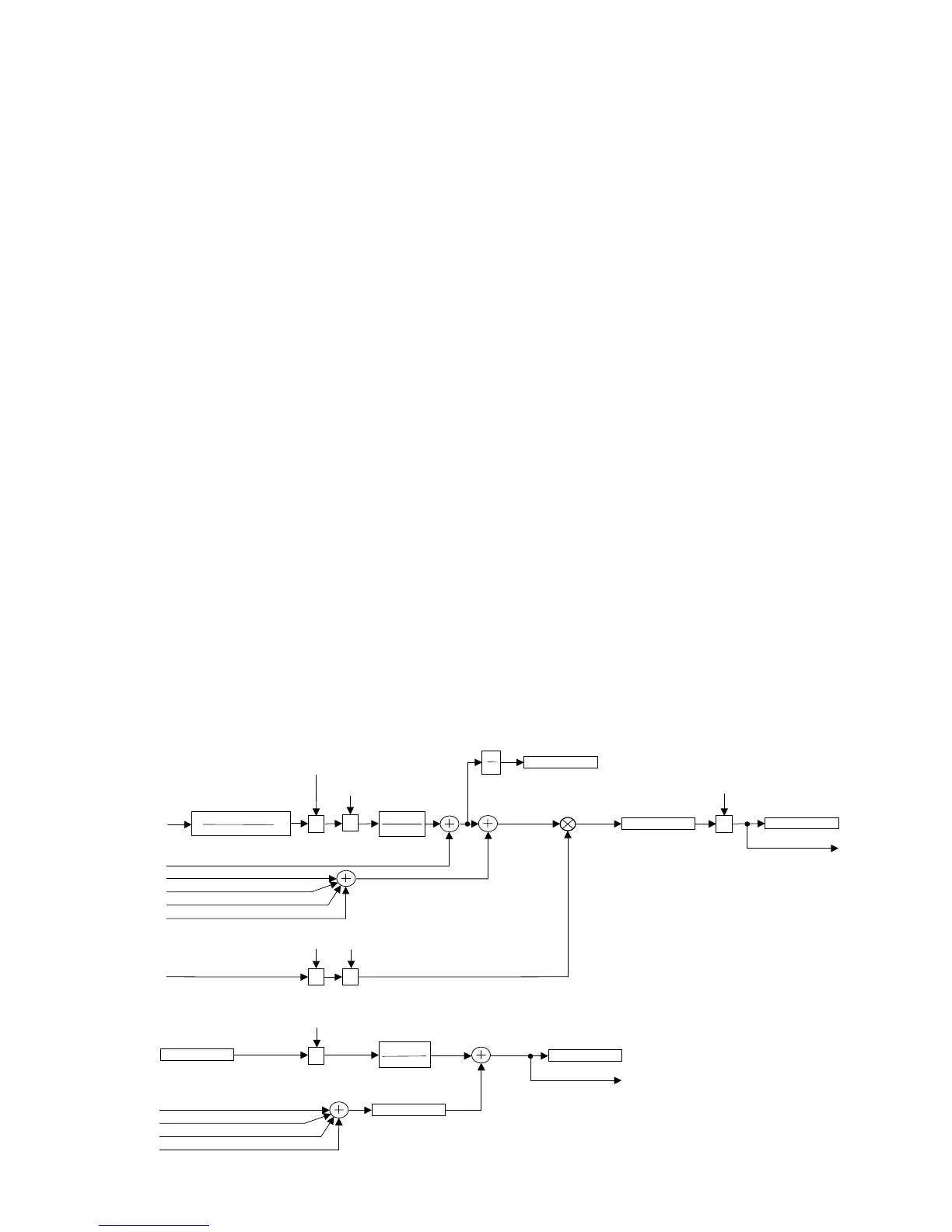
Functional Description
Phase Move: Offset
(Accumulator)
(Accumulator)
B ScaleMaster
A ScaleMaster
-1
dt
d
Pos Feed Fwd
Phase Register: Offset
Phase Offset: Offset
Phase Tuning: Offset
-
+
-1
Master Pos +
Offset
Master Pos
(Int)
Phase Inch: Offset:
Master
Position
Invert
Master
Enable AND
NOT Reset
Invert
Slave
Enable AND
NOT Reset
Position
Error
Pos Error
(Int)
Output Scale
Invert
Output
Slave Position
Slave Pos (Int)
Phase Move: Speed
-1
Phase Register: Speed
Phase Inch: Speed
Speed Input
Invert
Speed OP
Fwfwd Scale
Phase PID: Feed Forward
Speed Output
Gearing B
Gearing A
B
Gearing
A Gearing
Σ
Σ
-1
Output
Phase PID: Error
Phase Tuning: Speed
Parameter Descriptions
OUTPUT
Range: —.xx
Position output used for PHASE PID. Note: The output of this block contains valid information
beyond the final decimal place, the information is passed to PHASE PID and is used for
maximum precision.
SPEED OUTPUT
Range: —.xx
Speed output, used for PHASE PID:: FEED FWD input. Includes POS FEED FWD.
POS FEED FWD
Range: —.xx
Position feed-forward output.
SLAVE POS (INT)
Range: 0 -
Slave position in encoder units.
MASTER POS (INT)
Range: 0 -
Geared master position in encoder units.
MASTER POS
Range: —.
Geared Master position as a scaled integer.
MASTER POSITION
Range: —.xx
Geared Master position scaled in encoder units.
MSTR POS+OFFSET
Range: —.xx
Geared Master position + offset. This is master position demand.
SLAVE POSITION
Range: —.xx
Slave position scaled in encoder units.
POS ERROR INT
Range: —.
Position error scaled in scaled counts.
POSITION ERROR
Range: —.xx
Position error scaled in encoder units.

 Loading...
Loading...







