Operating Instructions Chapter 5
Flexi Classic Gateways
8011834/YT28/2016-03-15 © SICK AG • Industrial Safety Systems • Germany • All rights reserved
35
Subject to change without notice
CANopen Gateway
5.2 Planning
5.2.1 EDS file
The device characteristics are described using the Electronic Data Sheet (EDS), which
every standard bus configuration tool uses.
5.2.2 PCS
With so-called PDO linking (the arbitrary assignment of CAN identifiers to the individual
ProcessDataObjects), CANopen makes it possible to setup multi-master networks.
However, if the CANopen devices are to be controlled from a central instance, the CAN
identifiers to be used can be restricted to a pre-defined set, the Predefined Connection Set
PCS. Then the CAN controller only accepts CAN messages addressed to the related device.
A CANopen device (e.g. the UE410-CAN Gateway) makes its inputs and outputs available
as “communication objects” that can be addressed or sent using the PCS identifiers.
The PCS operating mode provides two crucial advantages:
The CANopen-PCS protocol can be implemented on a controller or a PC without major
effort. Planning is significantly simplified, as within the PCS all CAN identifiers are
unique in relation to the node address. As a result, time and costs for setting up simple
networks are reduced.
Due to the PCS addressing, the UE410-CAN is insensitive particularly to high bus loads
and ensures vary fast I/O communication. With synchronous communication, response
times of approx. 300 Vs are achieved. All four reply PDOs are sent in a period < 1 ms
after receipt of a Sync (baud rate = 1000 KBit/s).
The PCS comprises 2 broadcast objects SYNC and NMT and a total of 12 peer-to-peer
objects. Each of these objects has a unique 11-bit CAN identifier that comprises a function
code and a device address. The device address for the broadcast objects is 0, for the other
objects 1…127.
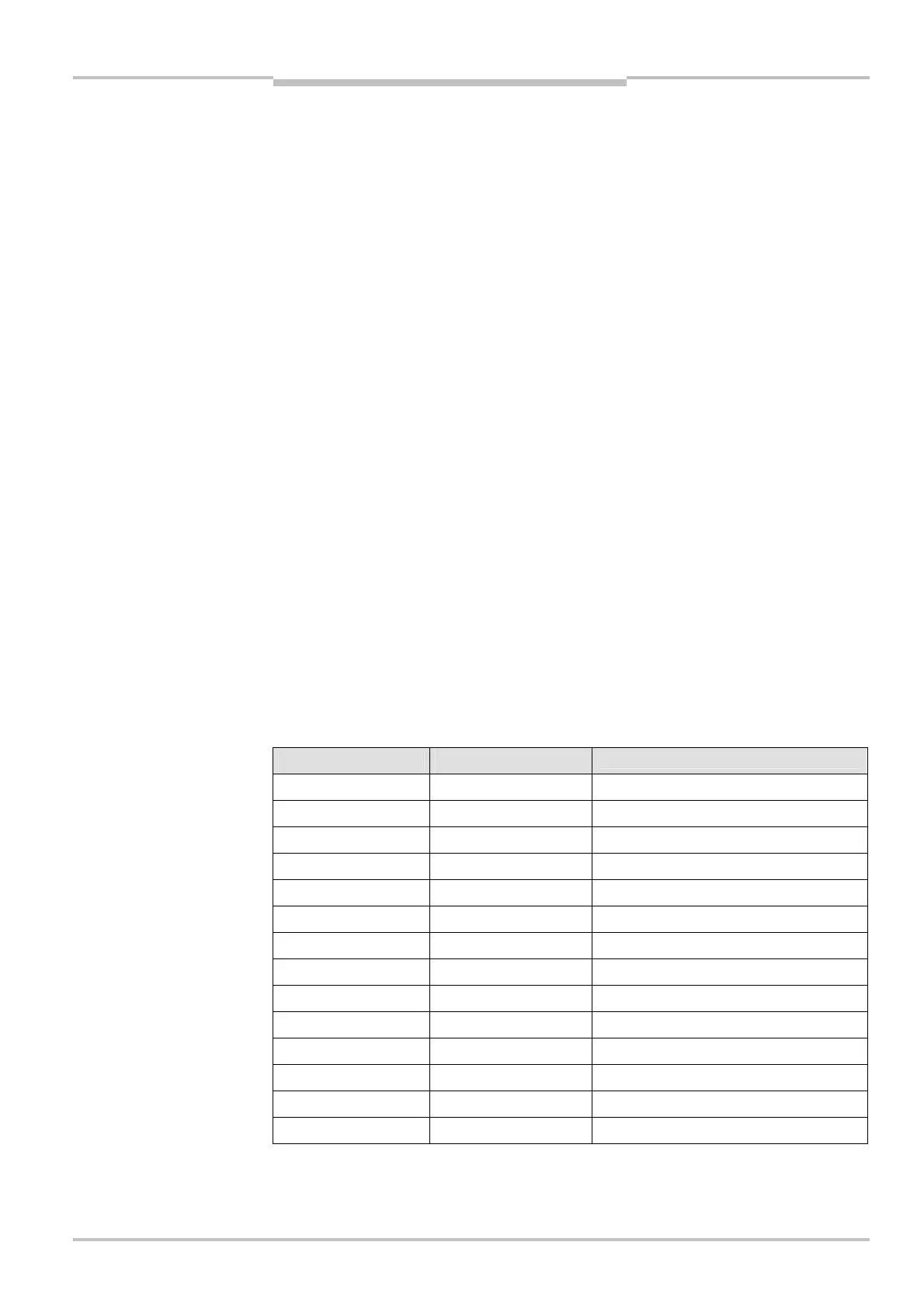
5.2.3 Format of diagnostics data
Object CAN identifier
Meaning
NMT 00h Network management
SYNC 80h Sync message
EMERGENCY 081h..0FFh Status message
TxPDO1 181h..1FFh
Process data object 1 (see following page)
RxPDO1 201h..27Fh Process data object 1 (see following page)
TxPDO2 281h..2FFh Process data object 2 (see following page)
RxPDO2 301h..37Fh Process data object 2 (see following page)
TxPDO3 381h..3FFh Process data object 3 (see following page)
RxPDO3 401h..47Fh Process data object 3 (see following page)
TxPDO4 481h..4FFh Process data object 4 (see following page)
RxPDO4 501h..57Fh Process data object 4 (see following page)
TxSDO 581h..5FFh Sending service data
RxSDO 601h..67Fh Receiving service data
NMT-ErrorControl 701h..77Fh Node-guarding
(from the viewpoint of the CANopen server: Tx=Transmit, Rx=Receive)
tics data