n
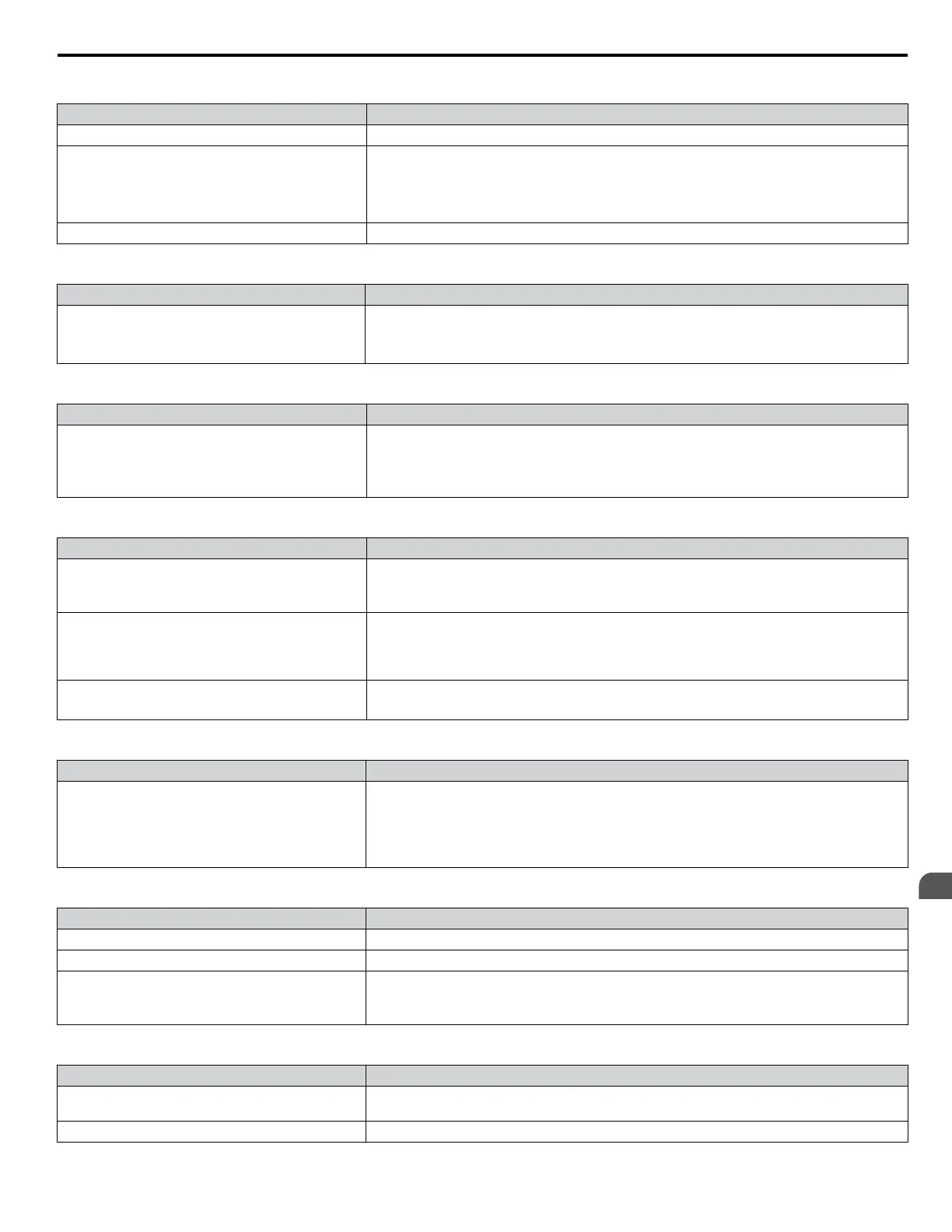
Oscillation or Hunting
Cause Possible Solutions
Insufficient tuning. Adjust Hunting prevention Gain Setting (n1-02).
The frequency reference is assigned to an external
source and the signal is noisy.
• Ensure that noise is not affecting the signal lines.
•
Separate main circuit wiring and control circuit wiring.
• Use twisted-pair cables or shielded wiring for the control circuit.
• Increase the analog input time filter constant (H3-13).
The cable between the drive and motor is too long. • Reduce the length of the cable.
n
Motor Rotates After the Drive Output is Shut Off
Cause Possible Solutions
Low DC Injection Braking and the drive cannot
decelerate properly.
• Adjust the DC Injection braking settings.
•
Increase the value of b2-02 (DC Injection Braking Current).
• Increase the b2-04 (DC Injection Braking Time at Stop).
n
ov or Speed Loss Occurs When Starting into a Rotating Load
Cause Possible Solutions
The load is already rotating when the drive is trying to
start it.
• Stop the motor using DC Injection braking. Restart the motor.
•
Increase the value of b2-03 (DC Injection Braking Time at start).
•
Set a multi-function input terminal for external Speed Search command (H1-oo=“61” or
“62” during restart).
n
Output Frequency is not as High as Frequency Reference
Cause Possible Solutions
Frequency reference is set within the range of the Jump
Frequency.
• Adjust the parameters used for the Jump Frequency function (d3-01, d3-02).
•
Enabling the Jump Frequency prevents the drive from outputting the frequencies specified in
the Jump Frequency range.
Upper limit for the frequency reference has been
exceeded.
• Set the maximum output frequency and the upper limit for the frequency reference to more
appropriate values (
E1-04, d2-01).
• The following calculation yields the upper value for the output frequency = E1-04 x d2-01 /
100
Large load triggered Stall Prevention function during
acceleration.
• Reduce the load.
•
Adjust the Stall Prevention level during acceleration (L3-02).
n
Buzzing Sound from Motor at 2 kHz
Cause Possible Solutions
Exceeded 110% of the rated output current of the drive
while operating at low speeds.
• If the output current rises too high at low speeds, the carrier frequency automatically reduces
and causes a whining or buzzing sound.
•
If the sound is coming from the motor, disable carrier frequency derating (L8-38 = “0”).
• Disabling the automatic carrier frequency derating increases the chances of an overload fault
(oL2). Switch to a larger capacity motor if oL2 faults occur too frequently.
n
Motor Does Not Operate When the RUN Button on the Digital Operator is Pressed
Cause Possible Solutions
The LOCAL/REMOTE mode is not selected properly. Press the LOCAL/REMOTE button to switch. The LO/RE LED should be on for LOCAL mode.
The drive is not in drive mode. A run command will not be issued. Exit to the drive mode and cycle the run command.
The frequency reference is too low.
• If the frequency reference is set below the frequency set in E1-09 (Minimum Output
Frequency), the drive will not operate.
•
Raise the frequency reference to at least the minimum output frequency.
n
Motor Does Not Operate When an External Run Command is Input
Cause Possible Solutions
The LOCAL/REMOTE mode is not selected properly.
Press the LOCAL/REMOTE button to switch. The LO/RE LED should be off for REMOTE
mode.
The drive is not in Drive Mode. A run command will not be issued. Exit to the Drive mode and cycle the run command.
6.8 Troubleshooting without Fault Display
YASKAWA ELECTRIC SIEP C710606 31B YASKAWA AC Drive – J1000 Technical Manual
151
6
Troubleshooting
http://nicontrols.com

 Loading...
Loading...









