n
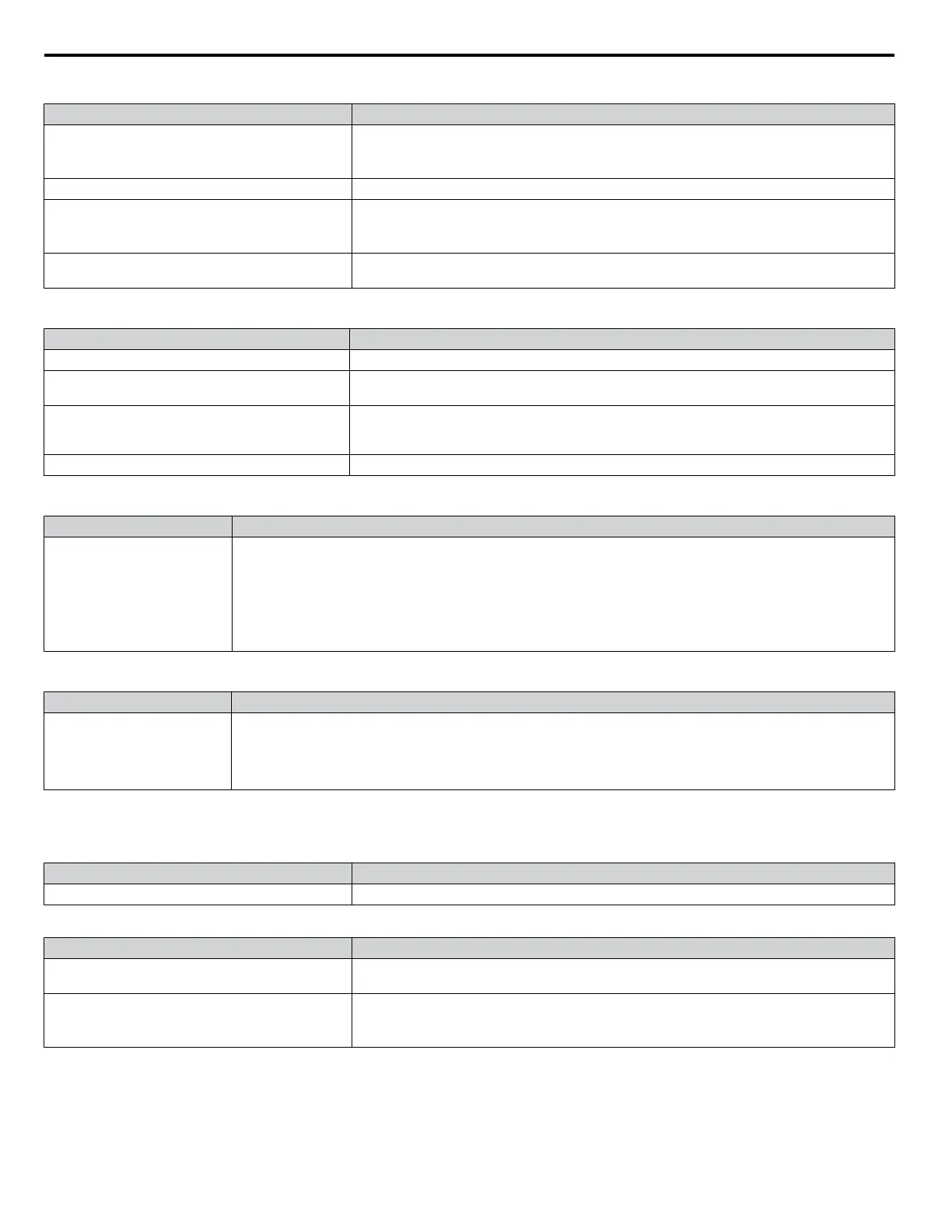
Deceleration Takes Longer Than Expected when Using a Braking Resistor
Cause Possible Solutions
L3-04 is set incorrectly.
• Check the Stall Prevention Level during deceleration (L3-04).
•
If a braking resistor option has been installed, disable Stall Prevention during deceleration
(L3-04 = “0”).
The deceleration time is set too long. Set deceleration to more appropriate time (C1-02 and C1-04).
Insufficient motor torque.
• Assuming parameter settings are normal and that no overvoltage occurs when there is
insufficient
torque, it is likely that the demand on the motor has exceeded the motor capacity.
• Use a larger motor.
Load exceeded the internal torque limit determined by
the drive rated current.
Switch to a larger capacity drive.
n
Motor Hunting Occurs When Operating With a Light Load
Cause Possible Solutions
Carrier frequency is too high. Lower the carrier frequency setting C6-02.
Large V/f setting value at low speeds triggers
overexcitation.
• Use
parameters E1-04 through E1-10 to set the V/f pattern in relation to the load characteristics.
The maximum output frequency and the base
frequency
reference are not set properly in relationship
to each other.
Set the proper values for the maximum output frequency and base frequency (E1-04, E1-06).
Hunting Prevention is set up incorrectly. Adjust the hunting prevention gain (n1-02).
n
Noise From Drive or Output Lines When the Drive is Powered On
Cause Possible Solutions
Relay switching in the drive
generates excessive noise.
• Lower the carrier frequency (C6-02).
•
Install a noise filter on the input side of drive input power.
• Install a noise filter on the output side of the drive.
• Place the wiring inside a metal conduit to shield it from switching noise.
• Ground the drive and motor properly.
• Separate the main circuit wiring and the control lines.
n
Ground Fault Circuit Interrupter (GFCI) Trips During Run
Cause Possible Solutions
Excessive leakage current trips
MCCB.
• Increase the GFCI sensitivity or use GFCI with a higher threshold.
•
Lower the carrier frequency (C6-02).
• Reduce the length of the cable used between the drive and the motor.
• Install a noise filter or reactor on the output side of the drive.
n
Connected Machinery Vibrates When Motor Rotates
Excessive Motor Oscillation and Erratic Rotation
Cause Possible Solutions
Poor balance between motor phases. Check drive input power voltage to ensure that it provides stable power.
Unexpected Noise from Connected Machinery
Cause Possible Solutions
The carrier frequency is at the resonant frequency of
the connected machinery.
Adjust the carrier frequency using parameters C6-02 through C6-05.
The drive output frequency is the same as the resonant
frequency of the connected machinery.
• Adjust
the parameters used for the Jump Frequency function (d3-01 through d3-04) to skip the
problem-causing bandwidth.
• Place the motor on a rubber pad to reduce vibration.
Note: The drive may have trouble assessing the status of the load due to white noise generated when using Swing PWM (C6-02 = 7).
6.8 Troubleshooting without Fault Display
150
YASKAWA ELECTRIC SIEP C710606 31B YASKAWA AC Drive – J1000 Technical Manual
http://nicontrols.com

 Loading...
Loading...









