7.8 Current Position
7-25
7.8 Current Position
7.8.1 Current Position Window
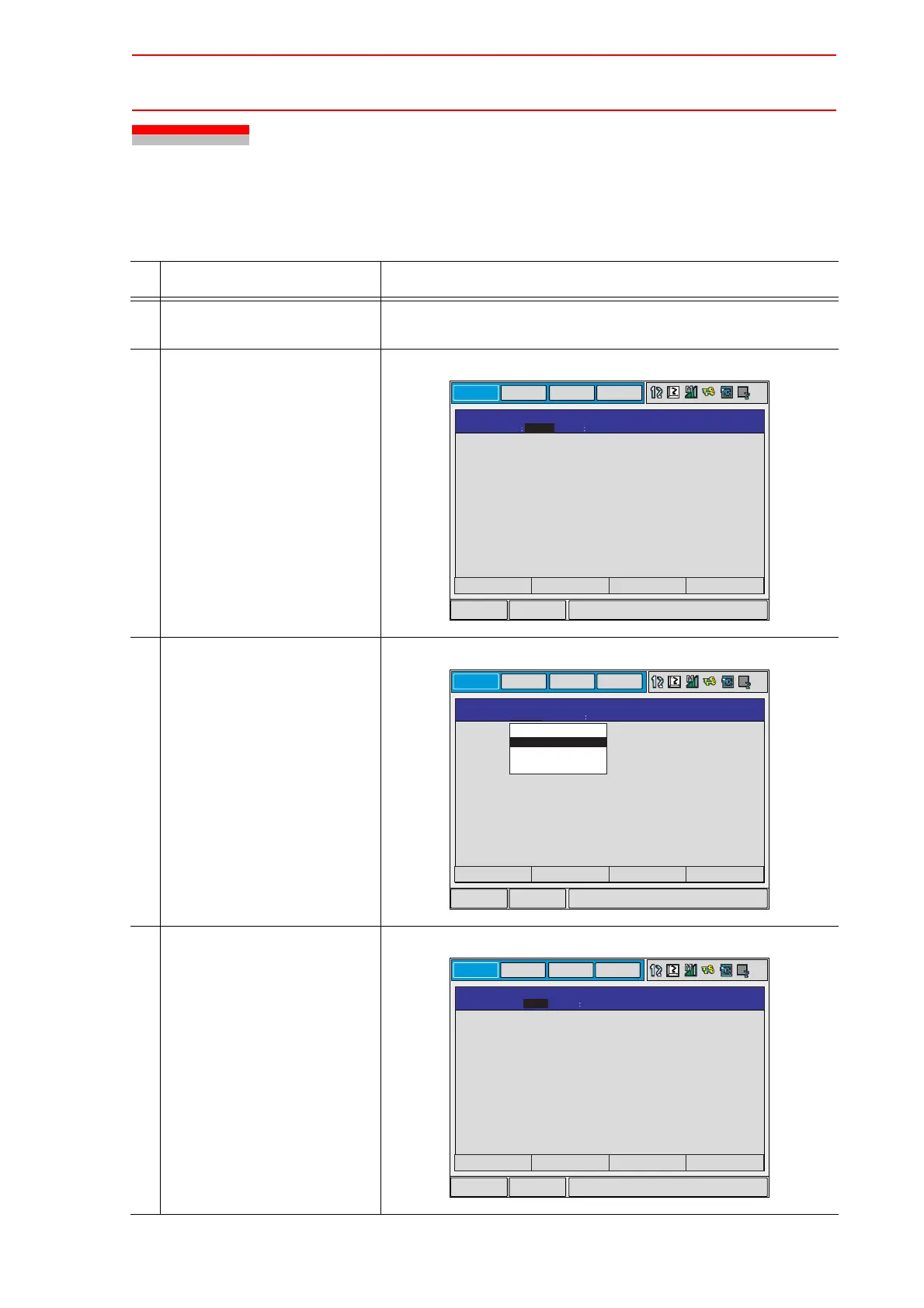
Operation Explanation
1 Select {ROBOT} under the
main menu.
2 Select {CURRENT POSI-
TION} under the sub menu.
The CURRENT POSITION window appears.
3 Select the types of coordi-
nates to be displayed.
The pull-down menu appears.
4 Select the desired coordinate
system.
The type of coordinates being displayed is changed.
EDIT
DISPLAY
UTILITY
Main Menu
Short Cut
CURRENT POSITION
TOOL
00
R1:
COORDINATE PULSE
DATA
PAGE
S
L
U
R
B
T
0
0
0
0
0
0
EDIT
DISPLAY
UTILITY
Main Menu Short Cut
CURRENT POSITION
R1: S
L
U
R
B
T
0
0
0
0
0
0
PULSE
BASE
ROBOT
USER
TOOL 00COORDINATE: PULSE
DATA
PAGE
EDIT
DISPLAY
UTILITY
Main Menu
Short Cut
CURRENT POSITION
TOOL
00
<ROBOT TYPE>
FRONT S< 180
UP R< 180
FLIP T< 180
COORDINATE: BASE
DATA
PAGE
X
Y
Z
915.00 mm
0.000 mm
765.000 mm
Rx
Ry
Rz
180.00 deg.
0.00 deg.
0.00 deg.
R1:

 Loading...
Loading...














