6.4 Setting the Second Home Position (Check Point)
6-16
6.4.2 Procedure for the Second Home Position Setting
(Check Point)
Apart from the "home position" of the manipulator, the second home position can be set up as
a check point for absolute data. Use the following steps to set the specified point.
If two or more manipulators or stations are controlled by one controller, the second home posi-
tion must be set for each manipulator or station.
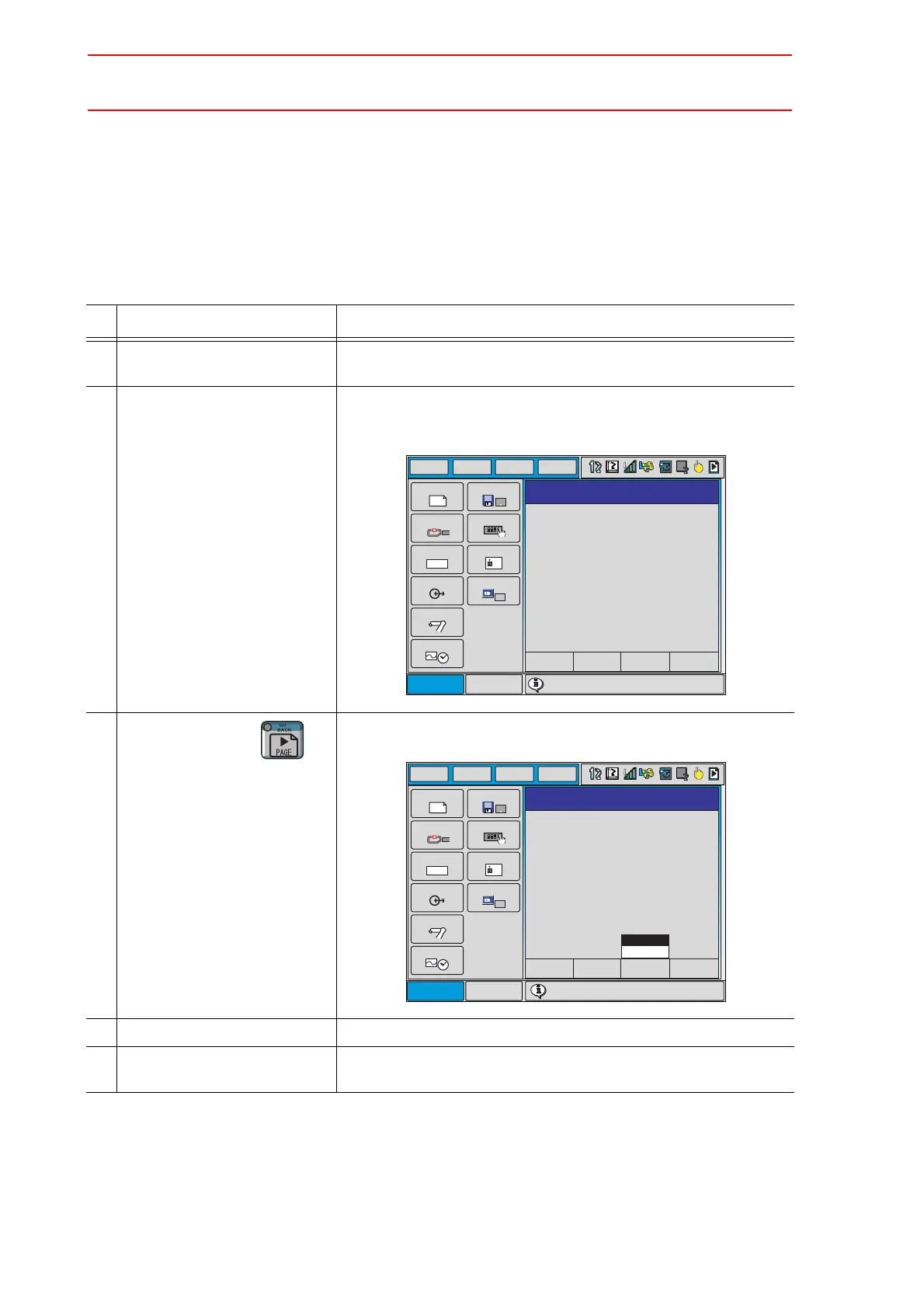
Operation Explanation
1 Select {ROBOT} under the
main menu.
2 Select {SECOND HOME
POS}.
The SECOND HOME POS window appears.
The message “Available to move to and modify specified point” is
shown.
3
Press the page key ,
or select "PAGE" to display the
selection window for the con-
trol group.
The group axes by which the second home position is set is
selected when there are two or more group axes.
4 Press the axis keys. Move the manipulator to the new second home position.
5 Press [MODIFY] and
[ENTER].
The second home position is changed.
Main Menu Short Cut
JOB
DOUT
MOVE
END
IN/OUT
In Out
SYSTEM INFO
ARC WELDING
VARIABLE
B001
ROBOT
CF
FD/CF
SETUP
PARAMETER
DISPLAY SETUP
Aa
DATA
EDIT
DISPLAY
UTILITY
T
PAGE
R1:S
L
U
R
B
T
000
000
000
000
000
000
SECOND HOME POS
SPECIFIED
CURRENT
DIFFERENCE
Available to move to and modify specified point
Main Menu
Short Cut
JOB
DOUT
MOVE
END
IN/OUT
In Out
SYSTEM INFO
ARC WELDING
VARIABLE
B001
ROBOT
CF
FD/CF
SETUP
PARAMETER
DISPLAY SETUP
Aa
DATA
EDIT
DISPLAY
UTILITY
T
PAGE
R1:S
L
U
R
B
T
000
000
000
000
000
000
SECOND HOME POS
SPECIFIED CURRENT
DIFFERENCE
S1:STATION1
R1:ROBOT
Available to move to and modify specified point

 Loading...
Loading...














