AvL Proprietary and Confidential
Content is Subject to Change without Notice Page 114 of 195
The “Fast” setting is typically set to a value at or above the maximum speed that the antenna axis
can move. Setting a value higher than the maximum actual speed has no effect, ill or otherwise.
Common values are in the area of 1 to 6 degrees per second.
The “Slow” setting is typically set to a very low value. This allows very fine adjustments to be made
such that accurate fine peaking on that axis can be easily verified or emulated. Common values are
in the area of 0.1 to 2 degrees per second.
Manual Control Allow Modem Tx. makes transmitting from modem possible in manual mode.
Typically this is not recommended, given the possibility of unintended interference and should be
used with caution.
The Step Mode Sample Delay parameter is the delay in ms between testing and retrying the step jog
mode move.
6.3.4 Acquisition
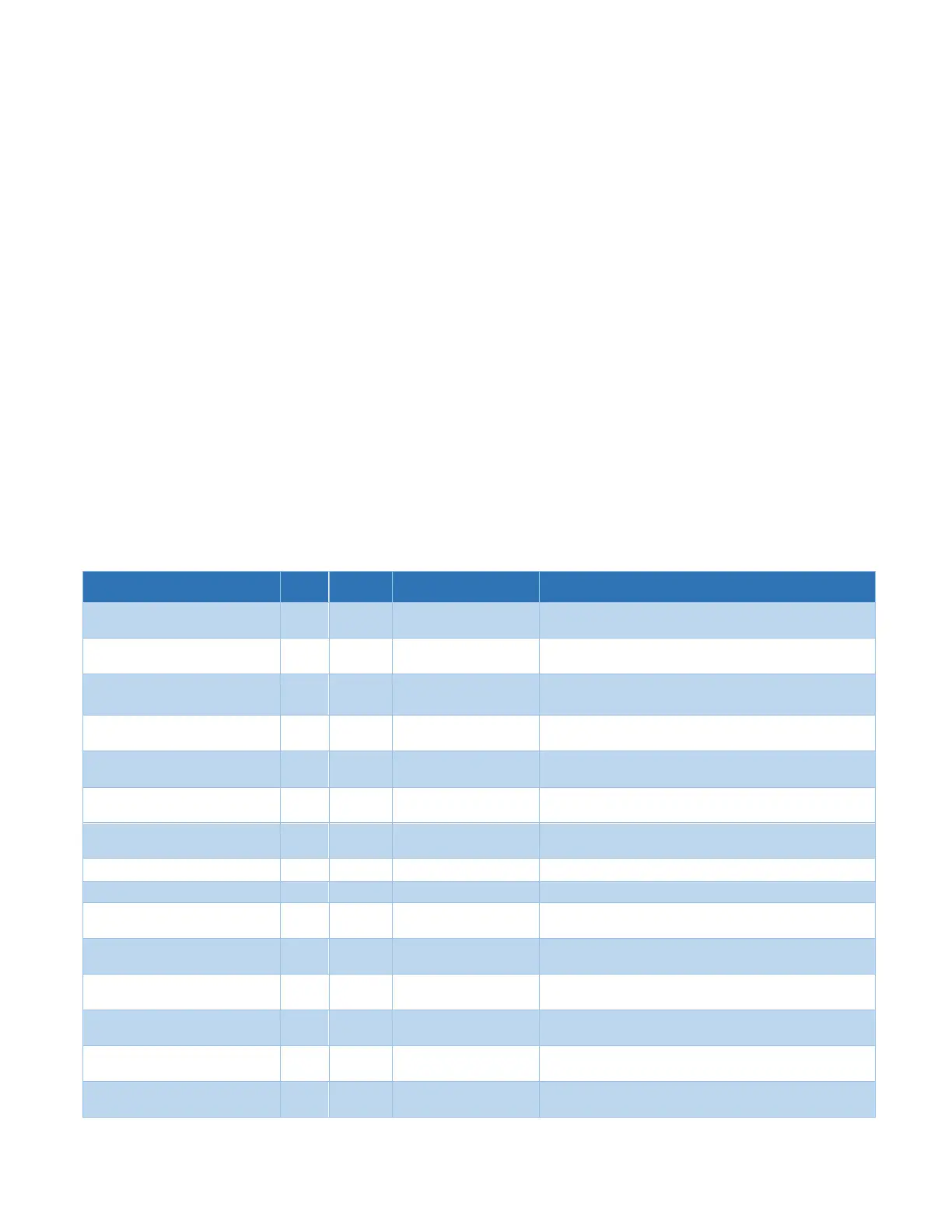
Line Scan Polarization Adjust
Flag
Flag indicating that the Pol should be adjusted during a
line scan. Usually set to Yes.
Scan width to use during a SatTant or 0.0 to disable
SatTant.
Scan width to use during a SatTant or 0.0 to disable
SatTant.
Manual Compass Scan Width
Heading scan width in degrees to scan if override
compass is selected.
Scan width to use during a SatTant or 0.0 to disable
SatTant.
This will be added to pol when target is below CCW
limit & subtracted when above CW limit.
Polarization Home Position
Position in degrees of the pol home switch
Offset in degrees to add to the pitch inclinometer
Offset in degrees to add to the roll inclinometer
Azimuth Motor Scale Factor
Unit factor to divide by to produce the actual value
needed by code
Azimuth Motor Abs Enc Offset
The offset in degrees to be added to the read position
of the absolute encoder
Azimuth Motor Abs Enc Scale
Factor
The factor that will be multiplied to the raw absolute
encoder or resolver value
Elevation Motor Scale Factor
Unit factor to divide by to produce the actual value
needed by code
Elevation Motor Abs Enc Offset
The offset in degrees to be added to the read position
of the absolute encoder
Elevation Motor Abs Enc Scale
Factor
The factor that will be multiplied to the raw absolute
encoder or resolver value