Operating Instructions ACU
Emergency stop anti-clockwise
The parameter Maximum Leading 426 limits the difference between the output of the ramp and the
current actual value of the drive. The set maximum deviation is a dead time for the control system
which should be kept as low as possible.
In case the drive is loaded heavily and high acceleration and deceleration values are selected it is
possible, that a set controller limit is reached while the drive is accelerated or decelerated. In this
case, the drive cannot follow the defined acceleration or deceleration ramps. With Maximum
Leading 426 , you can limit the max. leading of the ramp.
Example: Fixed value at ramp output = 20 Hz, current actual value of drive = 15 Hz, selected
Maximum Leading 426 = 5 Hz
The frequency at the ramp output is increased to 15 Hz only, it is not increased further. The
difference (leading) between the frequency value at the ramp output and the current actual
frequency of the drive is limited to 5 Hz in this way.
The load occurring in a linear acceleration of the drive is reduced by the adjustable modification
speeds (S curve). The non-linear course of the frequency is defined as a ramp and states the time
range in which the frequency is to be guided to the set ramp. The values set with parameters 420
to 423 are maintained regardless of the selected ramp times.
Setting the ramp rise time to 0 ms deactivates the function S curve and enables the use of the linear
ramps. The data set change-over of the parameters within an acceleration phase of the drive
mechanism demands the defined take-over of the values. The controller calculates the values
required in order to reach the reference value from the ratio of the acceleration to the ramp time
and uses it until the acceleration phase is complete. With this method, exceeding the reference
values is avoided and a data set change-over between extremely deviating values becomes possible.
Ramp rise time anticlockwise
Ramp rise time anticlockwise
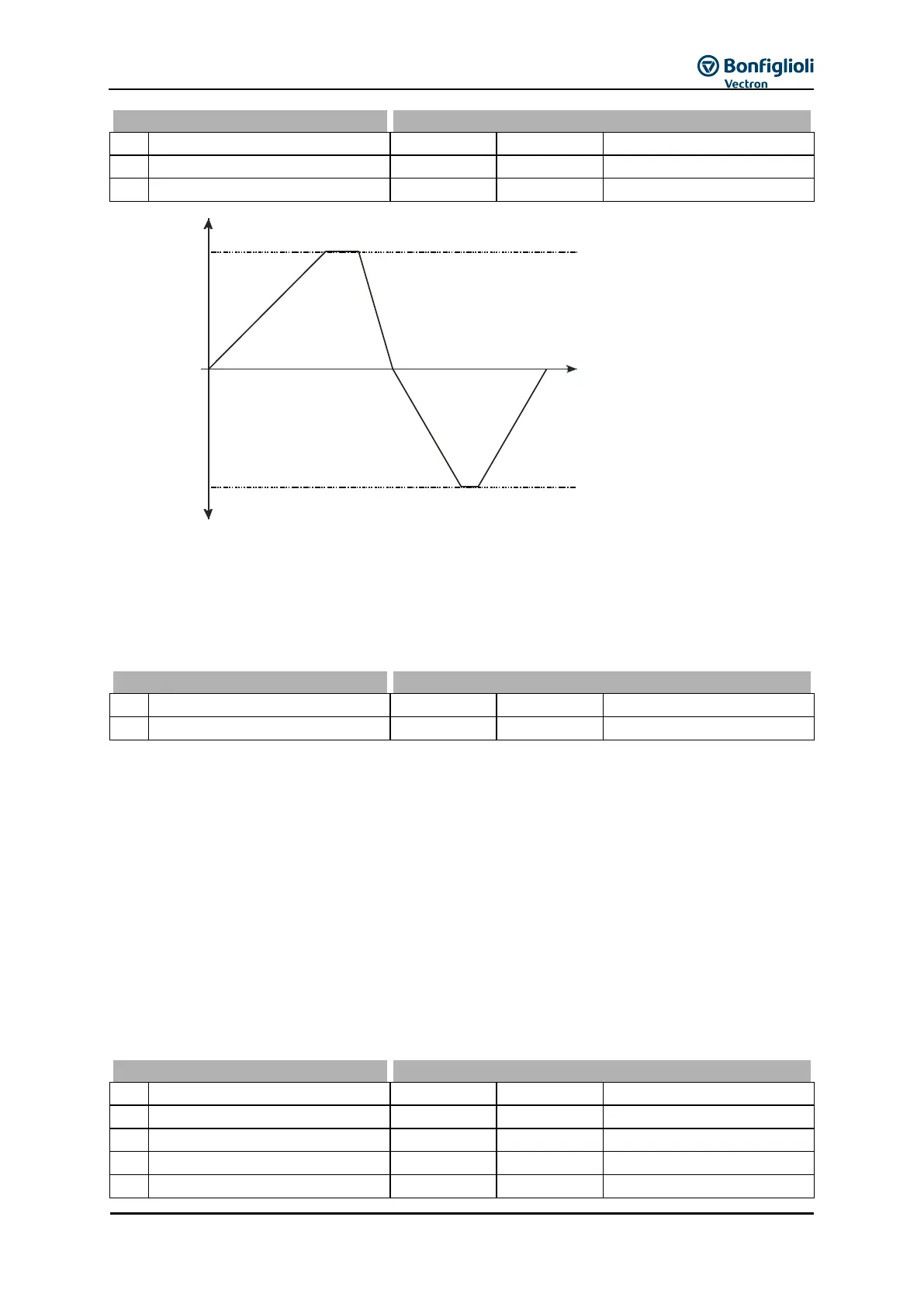
Rotary field
clockwise
Rotary field
anticlockwise
+f
max
-f
ma x
t
Acceleration
(Clockwise) 420
Deceleration (Clockwise)
Emergency Stop
or
421
424Clockwise
Acceleration
anticlockwise() 422
Deceleration anticlockwise
Emergency Stop anticlockwise
or
423
425