Operating Instructions ACU
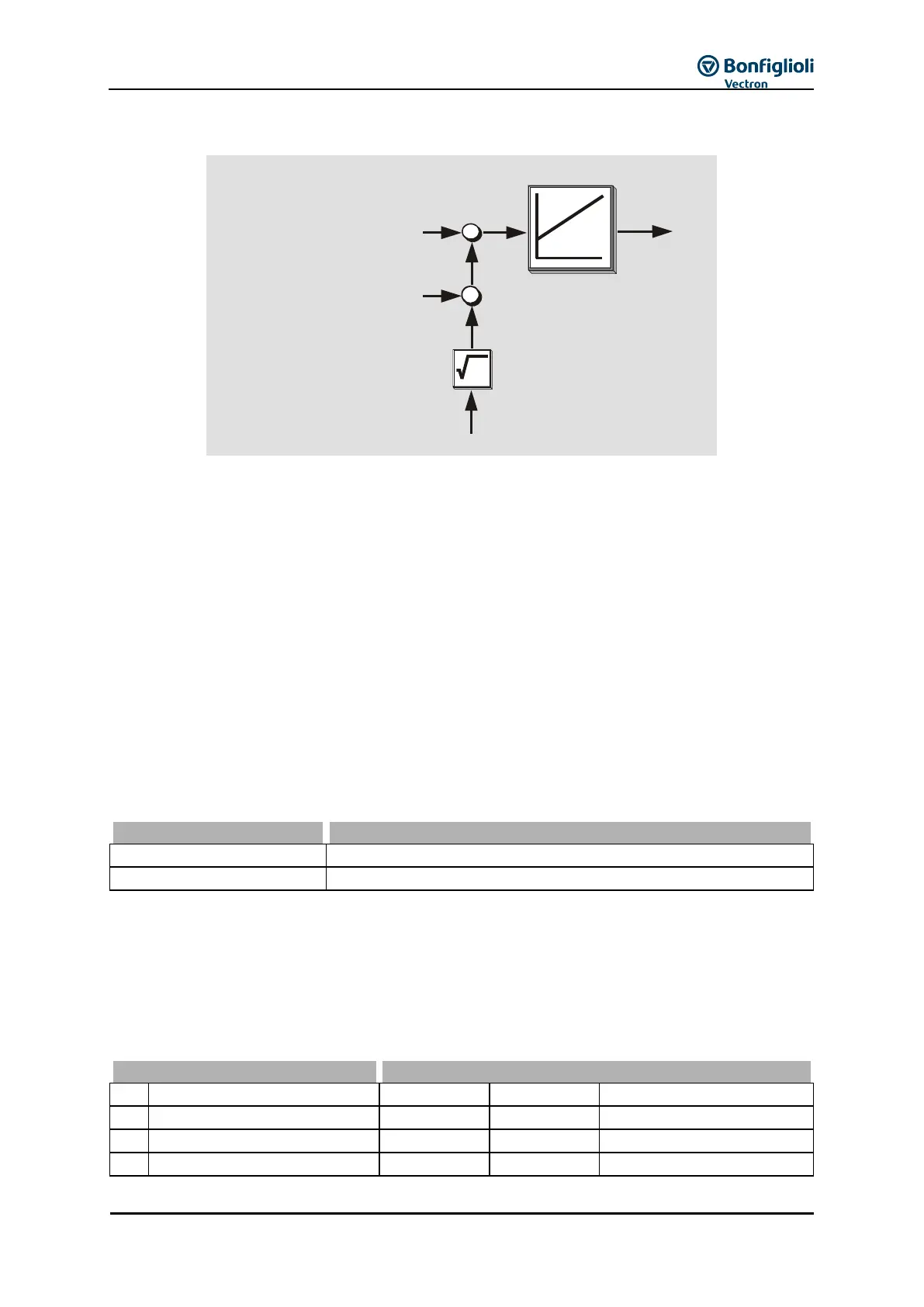
Structural image: Indirect Volume Flow Control
Technology controller
Ind. volume flow control factor 446
Actual percentage source 478
Actual values:
Volumetric flow 285
Pressure 286
-
Reference percentage source 476
x
18.4 Functions of sensorless control
The configurations of the sensorless control contain the following additional functions, which
supplement the behavior according to the parameterized V/f characteristic.
18.4.1 Slip compensation
The load-dependent difference between the reference speed and the actual speed of the 3-phase
motor is referred to as the slip. This dependency can be compensated by the current measurement
in the output phases of the frequency inverter.
Activation of Operation Mode 660 for the slip compensation enables as speed control without
feedback. The stator frequency and speed are corrected as a function of the load.
Slip compensation is turned on during guided commissioning. The Stator Resistance 377 is required
to ensure a correct function and is measured during guided commissioning.
If guided commissioning is not performed, slip compensation can also be activated manually. In this
case enter the Stator Resistance 377 manually, refer to motor data sheet.
The slip compensation is deactivated.
The load-dependent slip speed is compensated
The control behavior of the slip compensation can only be optimized via the parameters in the case
of specific applications. Parameter Amplification 661 determines the correction of the speed and
the effect of the slip compensation proportionally to the change of load. Max. Slip Ramp 662
defines the max. frequency change per second in order to avoid an overload in the case of a load
change.
Parameter Minimum Frequency 663 determines the frequency as from which the slip compensation
becomes active.