function allows slower PID settings for when there are no changes or stabilising, and when there are significant changes in the
system it will increase the reaction of the PID.
The "Kp gain compensation" consists of two separate functions:
1. The load change gain compensation.
2. Set point deviation compensation.
These two functions, the load-dependent compensation and the set point deviation compensation, can be used separately or
together. If they are used together, it is always the one with the highest returned gain that is used.
7.4.2 Load change gain compensation
In case of large load impacts or rejections, it can create large deviation in the need of cooling, and thereby create some instability in
the cooling system. To alleviate some of this instability, the load change gain compensation will instantaneously increase the gain in
relation to the load gain. Larger load changes give a bigger increase in gain. This increase in gain will decrease over a set time till it
reaches the nominal gain.
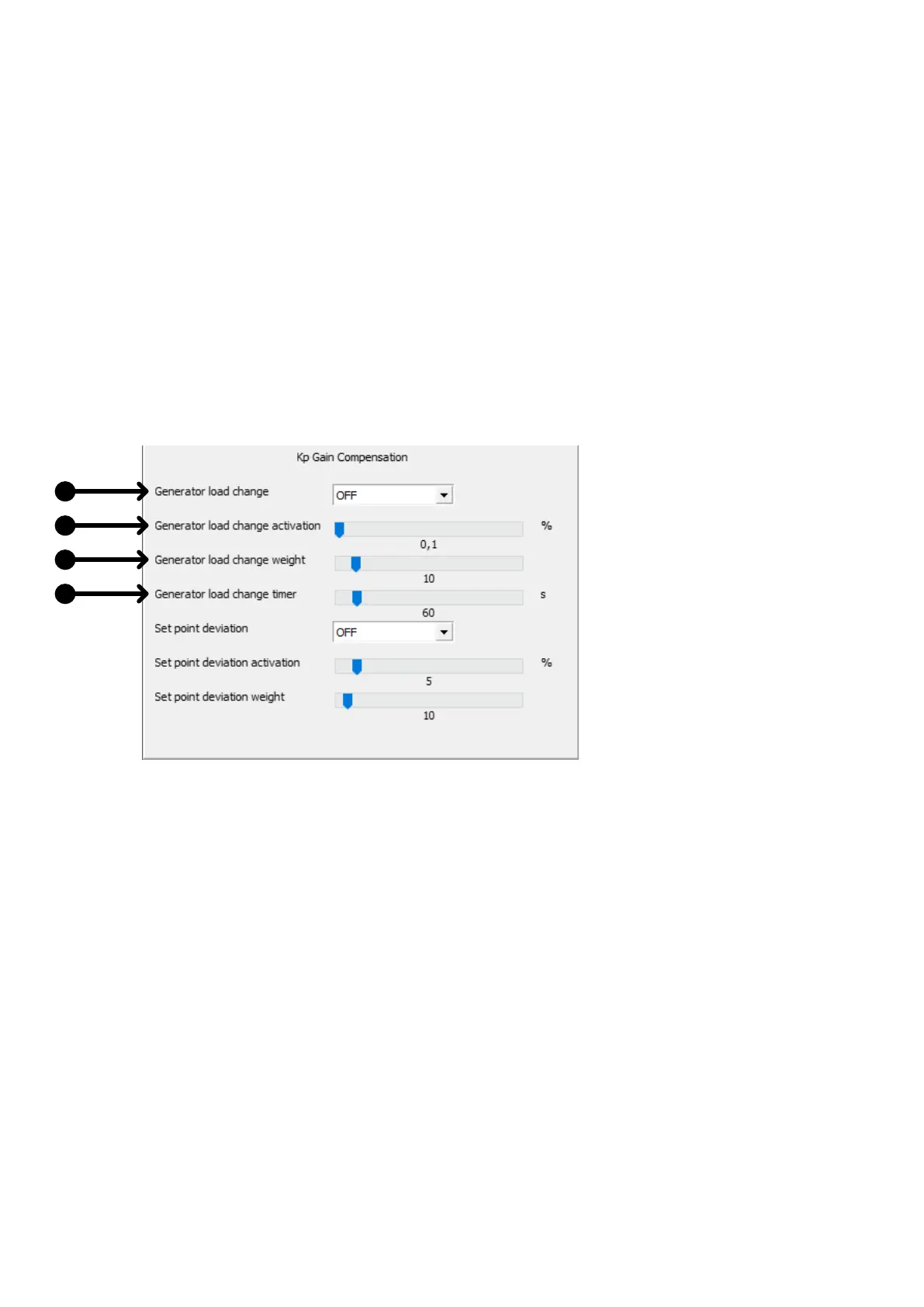
Explanation of settings
1. Generator load change: Enables/disables load change compensation.
2. Generator load change activation: Load change limit. The controller needs to detect a load change larger than this limit before
activating the gain compensation. For example, if the limit is set for 10 %, there must be a load impact or rejection of at least 10
% of the genset nominal power before this function activates.
3. Generator load change weight: The gain increase is based on the load change compared to nominal, and this ratio is
multiplied by the load weight.
4. Generator load change timer: The gain increase will be instantaneous, but it will decrease linearly over the set time until it
reaches nominal gain.
DESIGNER'S HANDBOOK 4189341275A EN Page 190 of 196
 Loading...
Loading...











