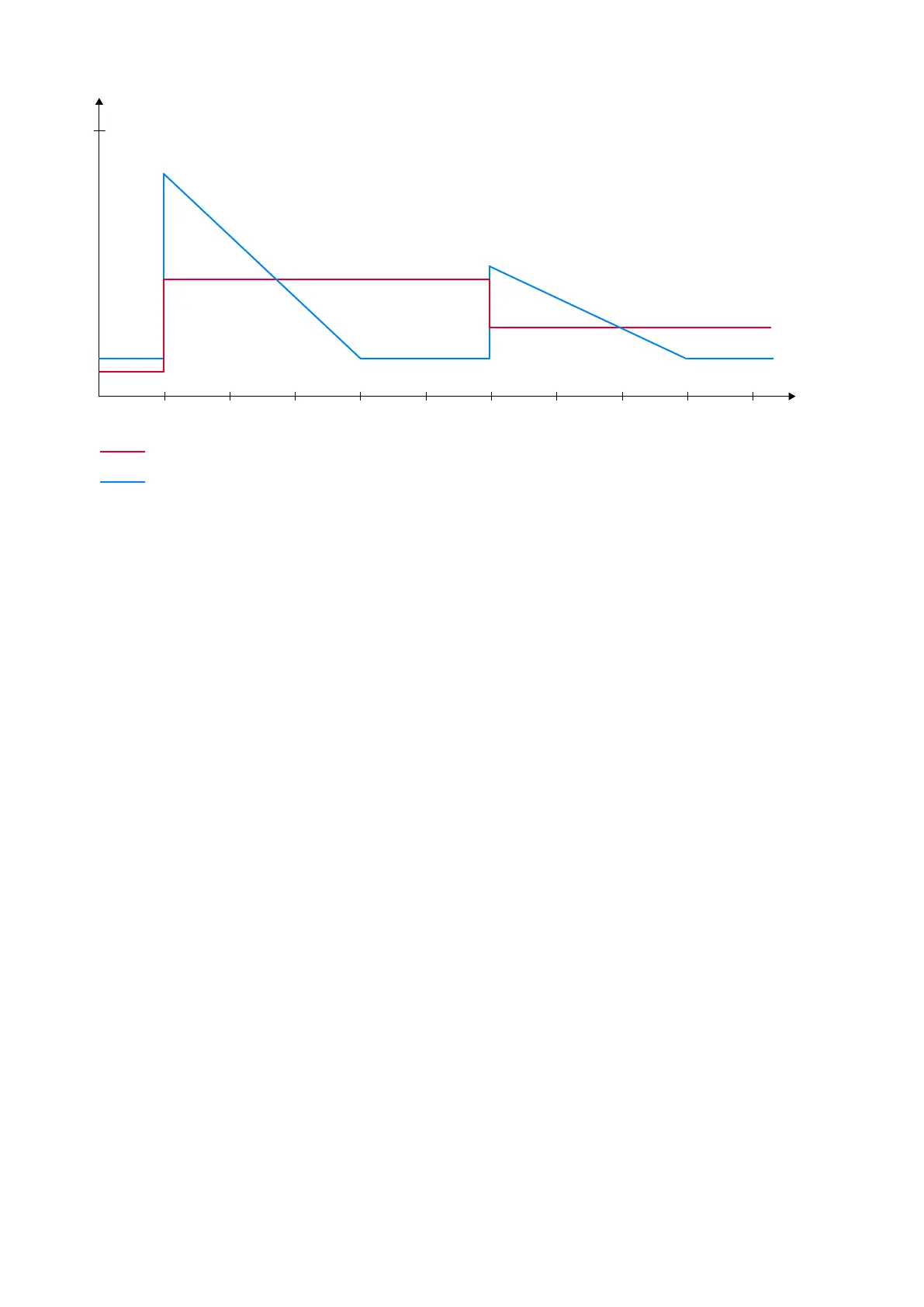
Example of load change gain compensation
sec
0
PID gain
Load %
50454035302520151050
% of nom. load
100
The diagram above shows the reaction of the gain, based on two load changes.
In the first situation, there is a large load impact that triggers the load change gain compensation and increases the gain
instantaneously. This increase will decrease, in this case over 15 seconds, and bring the gain back to nominal.
After some seconds, the system drops some load again, but only half of the former impact. Gain is again instantaneously increased,
but this time only half as much because the load change is only half as big. The increase will still decrease over 15 seconds.
7.4.3 Set point deviation compensation
This function is intended to help minimise overshoots. Especially in a cooling water system where the set point is often very close to
the shutdown limit, it is difficult for a slow system to react in time to avoid a shutdown. This function will drastically increase the gain
when the actual value overshoots the set point more than the set deadband, but the further the actual value is from the set point, it
will decrease. If the value drops below the set point, the function works reversed. Close to set point, the gain increase is small, but
the further the actual value is from the set point, it will increase. This is to avoid that the system starts hunting.
DESIGNER'S HANDBOOK 4189341275A EN Page 191 of 196
 Loading...
Loading...











