• de/dt = Slope of the deviation (how fast does the deviation occur)
This means that the D-regulator output depends on the slope of the deviation, the Kp and the Td setting.
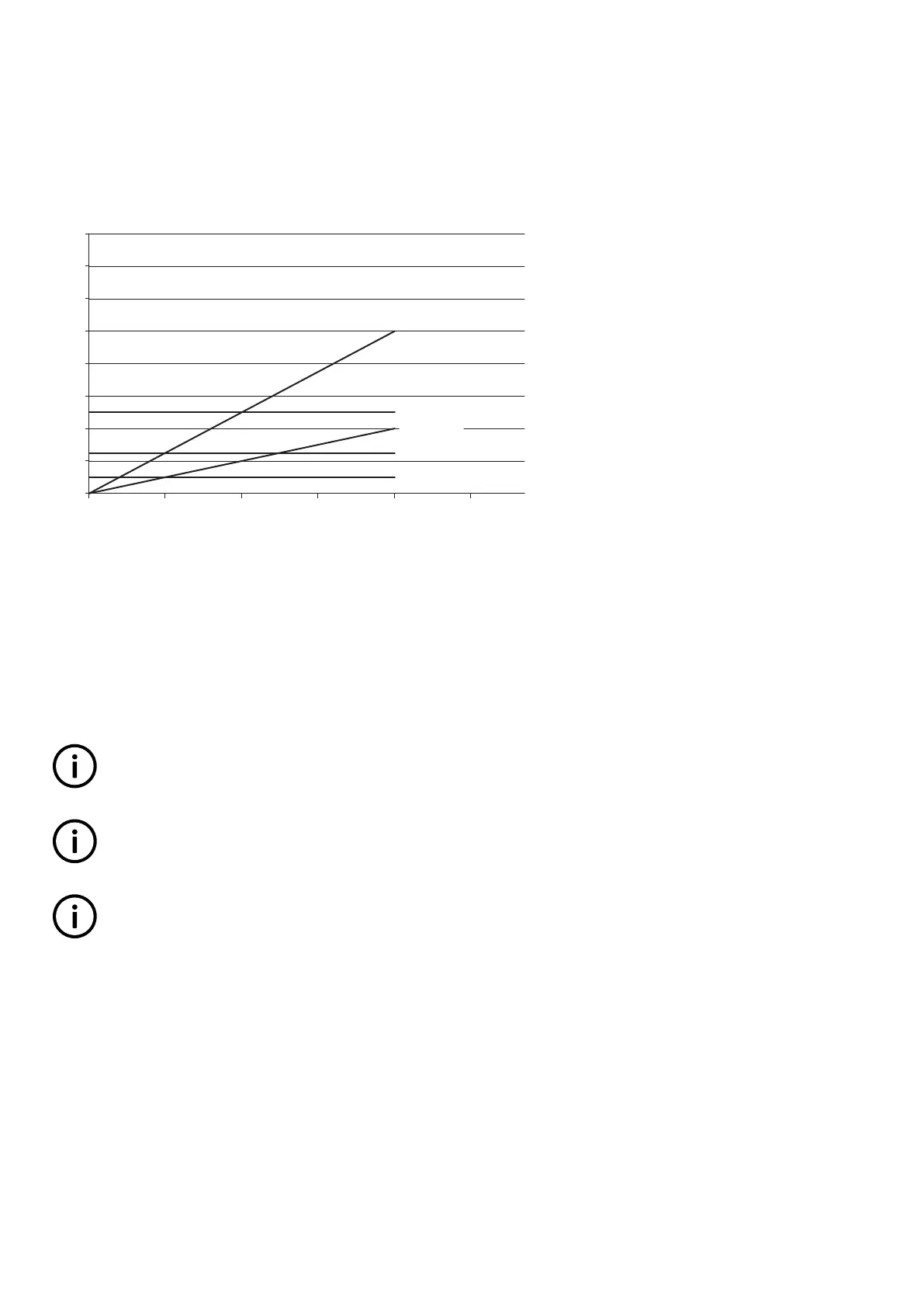
Example
In the following example it is assumed that Kp = 1.
Output/deviation
8
7
6
5
4
3
2
1
0
Time [s]
0 0.5 1 1.5 2 2.5
D-regulator
Deviation 2
D-output 2, Td = 1 s
Deviation 1
D-output 2, Td = 0.5 s
D-output 1, Td = 0.5 s
• Deviation 1: A deviation with a slope of 1.
• Deviation 2: A deviation with a slope of 2.5 (2.5 times bigger than deviation 1).
• D-output 1, Td=0.5 s: Output from the D-regulator when Td=0.5 s and the deviation is according to Deviation 1.
• D-output 2, Td=0.5 s: Output from the D-regulator when Td=0.5 s and the deviation is according to Deviation 2.
• D-output 2, Td=1 s: Output from the D-regulator when Td=1 s and the deviation is according to Deviation 2.
The example shows that the bigger deviation and the higher Td setting, the bigger output from the D-regulator. Since the D-regulator
is responding to the slope of the deviation, it also means that when there is no change the D-output will be zero.
INFO
When commissioning, please keep in mind that the Kp setting has influence on the D-regulator output.
INFO
If the Td is adjusted to 0 s, the D-regulator is switched OFF.
INFO
The derivative action time, Td, must not be too high. This will make the regulation hunt similar to a too high proportional
action factor, Kp.
4.5 Load share controller
The load share controller is used in whenever load sharing mode is activated. The load share controller is a PID controller similar to
the other controllers in the system and it takes care of frequency control as well as power control.
Adjustment of the load share controller is done in menu 2540 (analogue control) or 2590 (relay control).
The primary purpose of the PID controller is always frequency control because frequency is variable in a load sharing system as well
as the power on the individual generator. Since the load sharing system requires power regulation as well, the PID controller can be
affected by the power regulator. For this purpose a so-called weight factor is used (P
WEIGHT
).
DESIGNER'S HANDBOOK 4189341275A EN Page 79 of 196
 Loading...
Loading...











