4.4.3 Integral regulator
The main function of the integral regulator is to eliminate offset. The integral action time Ti is defined as the time the integral
regulator uses to replicate the momentary change of the output caused by the proportional regulator.
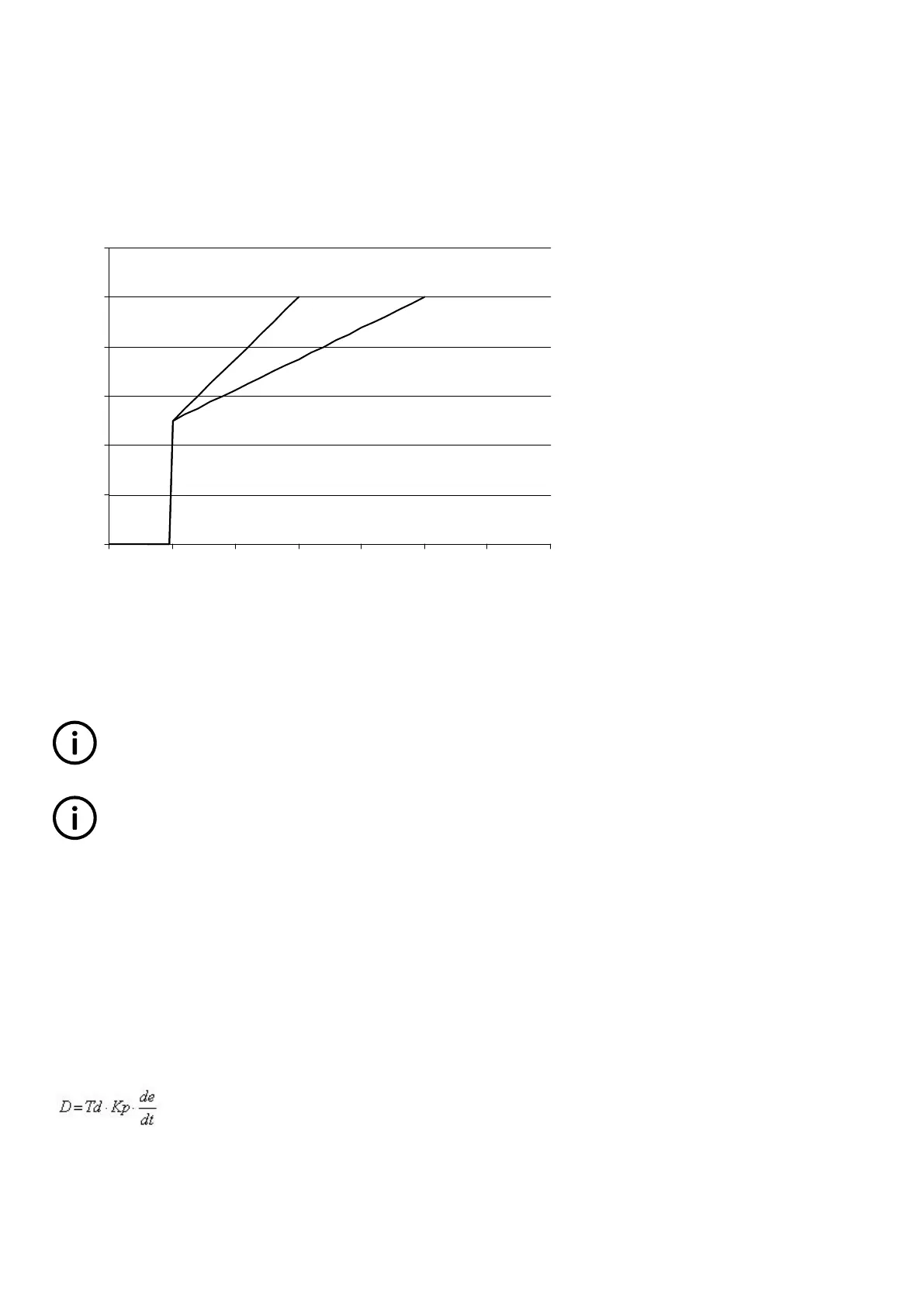
In the drawing below the proportional regulator causes an immediate change of 2.5 mA. The integral action time is then measured
when the output reaches 2 x 2.5 mA = 5 mA.
6
5
4
3
2
1
0
Integral action time, Ti
mA
Ti = 10 s Ti = 20 s
sec
0 5 10 15 20 25 30 35
As shown in the drawing, the output reaches 5 mA twice as fast at a Ti setting of 10 s than with a setting of 20 s.
The integrating function of the I-regulator is increased if the integral action time is decreased. This means that a lower setting of the
integral action time Ti results in a faster regulation.
INFO
If the Ti is adjusted to 0 s, the I-regulator is switched OFF.
INFO
The integral action time, Ti, must not be too low. This will make the regulation hunt similar to a too high proportional action
factor, Kp.
4.4.4 Derivative regulator
The main purpose of the derivative regulator (D-regulator) is to stabilise the regulation, thus making it possible to set a higher gain
and a lower integral action time Ti. This will make the overall regulation eliminate deviations much faster.
In most cases, the derivative regulator is not needed. However, for very precise regulation situations, for example, static
synchronisation, it can be very useful.
The output from the D-regulator can be explained with the equation:
• D = Regulator output
• Kp = Gain
DESIGNER'S HANDBOOK 4189341275A EN Page 78 of 196
 Loading...
Loading...











