AX-Series Motion Controller Instructions Manual Chapter 2
105
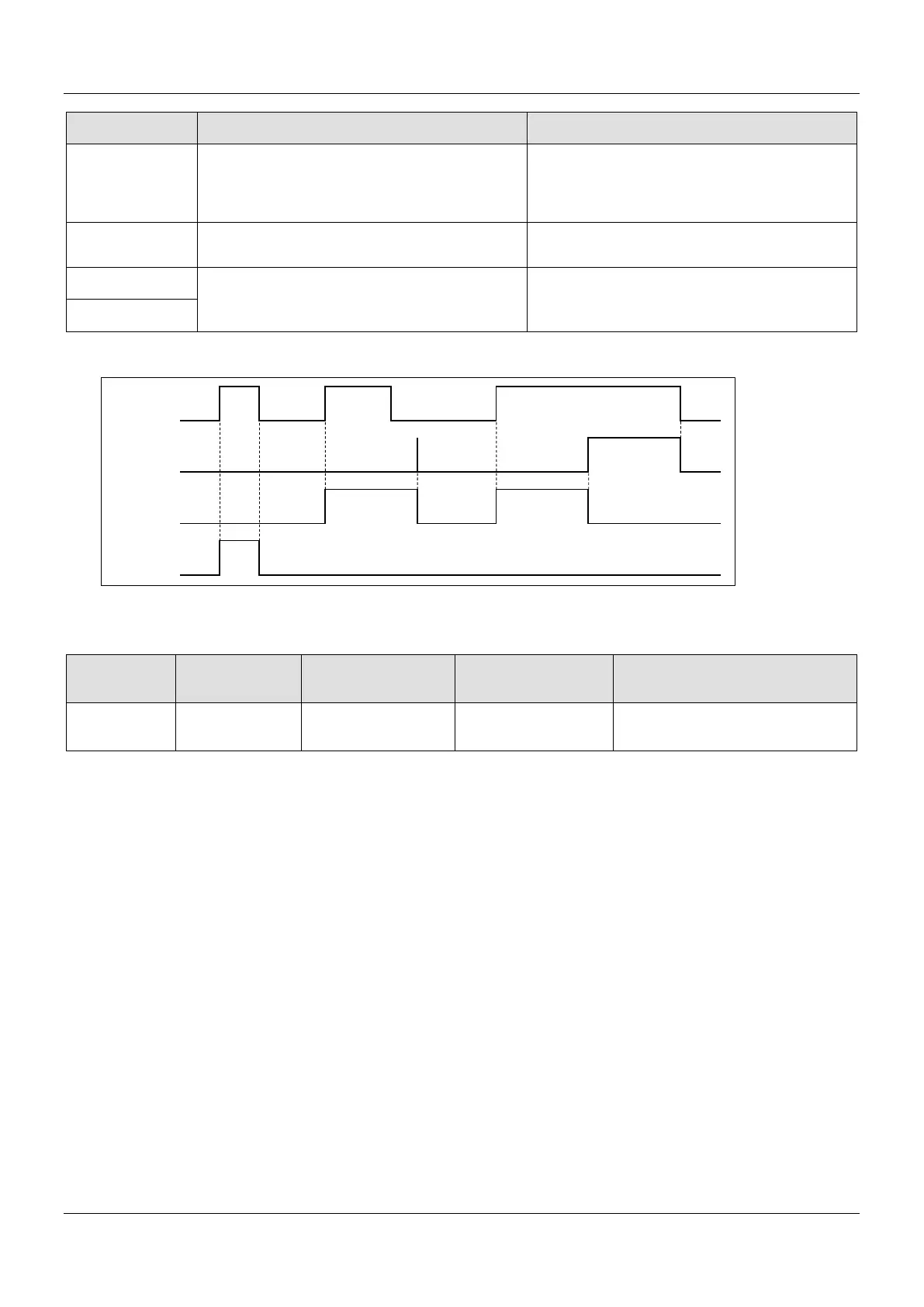
Name Timing for Shifting to True Timing for Shifting to False
Done
When the modification to coordinate is
completed.
When Execute turns from True to False.
If Execute is False and Done turns to True,
Done will be True for only one scan cycle and
immediately shift to False.
Busy
When Execute is triggered to be True.
When Error turns to True.
When an error occurs in the execution
conditions or input values for the instruction.
When Execute turns from True to False. (Error
Code is cleared)
Timing Diagram
Inputs/Outputs
Name Function Data Type
Setting Value
Timing to Take Effect
Axis Specify the axis. AXIS_REF_SM3* AXIS_REF_SM3
When Execute turns
to True and
Busy is False.
*Note: AXIS_REF_SM3(FB): Every function block contains this variable, which works as the starting program for function blocks.
Function
When configuring the parameters of axis position via MC_Position, there’s no displacement made by the axis itself but
instead, only the coordinate system moves.
To avoid possible position jumps occurring to the slave axis, you should avoid running MC_SetPosition to the
synchronized master axis, or discontinuous jumps in velocity will exist in the slave axis.
The value of Position will be added directly to the current position under the relative mode, which will be the new location
coordinate. For the absolute position, the value of Position will be set to the current location coordinate.
Troubleshooting
If an error occurs during the execution of the instruction, Error will change to True. You can refer to ErrorID (Error Code)
to address the problem.
Example
Example1: Demonstrate the condition of executing MC_MoveAbsolute while using MC_SetPosition to change the
coordinate system under relative mode.
 Loading...
Loading...

