AX-Series Motion Controller Instructions Manual Chapter 2
135
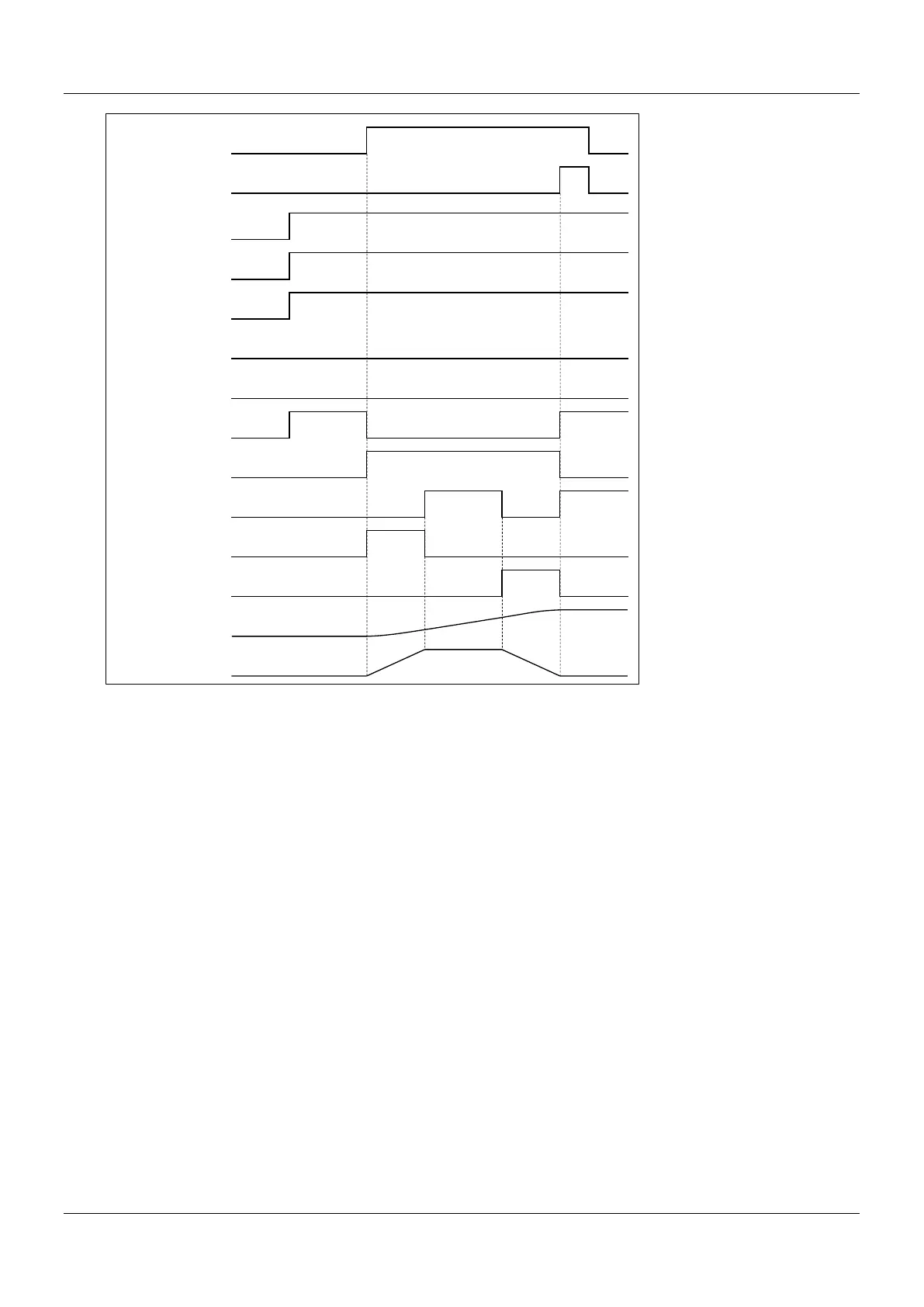
After MC_MoveAbsolute being run, axis state turns from Standstill to Discrete_motion. At the same time, the axis
begins to accelerate and OutputsAccelerating turns to True.
When axis velocity reaches the setting in MC_MoveAbsolute, the axis moves at constant speed. Meanwhile, the
output of ConstantVelocity turns to True and OutputsAccelerating turns to False. Upon moving close to the target
position, the axis starts decelerating, which Decelerating turns to True and ConstantVelocity turns to False.
Done of MC_MoveAbsolute turns to True when the target position is reached. Output status turns from
Discretemotion to Standstill.
 Loading...
Loading...

