AX-Series Motion Controller Instructions Manual Chapter 2
15
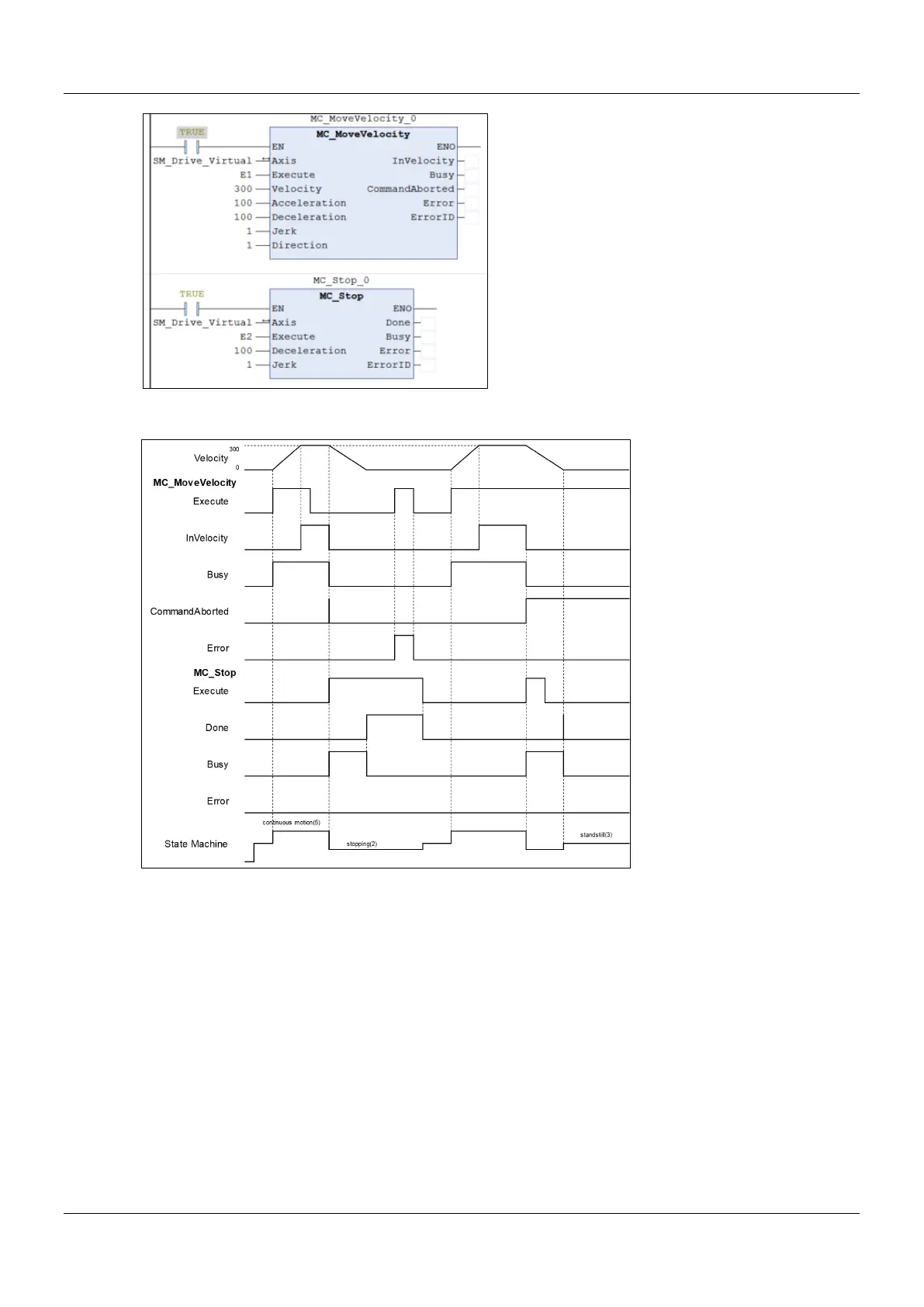
Timing Diagram
When Execute of MC_Stop changes to True, it triggers CommandAboted of MC_MoveVelocity at the same time and
the motion controller starts to decelerate the axis to a stop. The Axis state is moved to the “Stopping”.
When the axis reaches zero velocity, the Done output will change to True. Execute is still True so the axis state remains
in the state “Stopping”. After the stop is finished and Execute is False, the axis will change to Standstill.
In case MC_MoveVelocity runs again while the axis state is “Stopping”, an error will be reported. (Error Code:
SMC_AXIS_NOT_READY_FOR_MOTION).
 Loading...
Loading...

