AX-Series Motion Controller Instructions Manual Chapter 2
212
Name Function Data Type
bDone
When the homing is completed.
When bExecute turns to False.
When bError turns to True.
bBusy
TRUE.
When bExecute turns to False.
When bError turns to True.
bCommandAborted
When the instruction is aborted by
MC_Stop.
When bExecute turns to False.
bCommandAborted will change to False after
remaining True for one cycle when bExecute is
False but bCommandAborted changes to
When an error occurs in the
execution conditions or input
values for the instruction. (Error
When bExecute turns from True to False.
(Error code is cleared.)
ErrorID
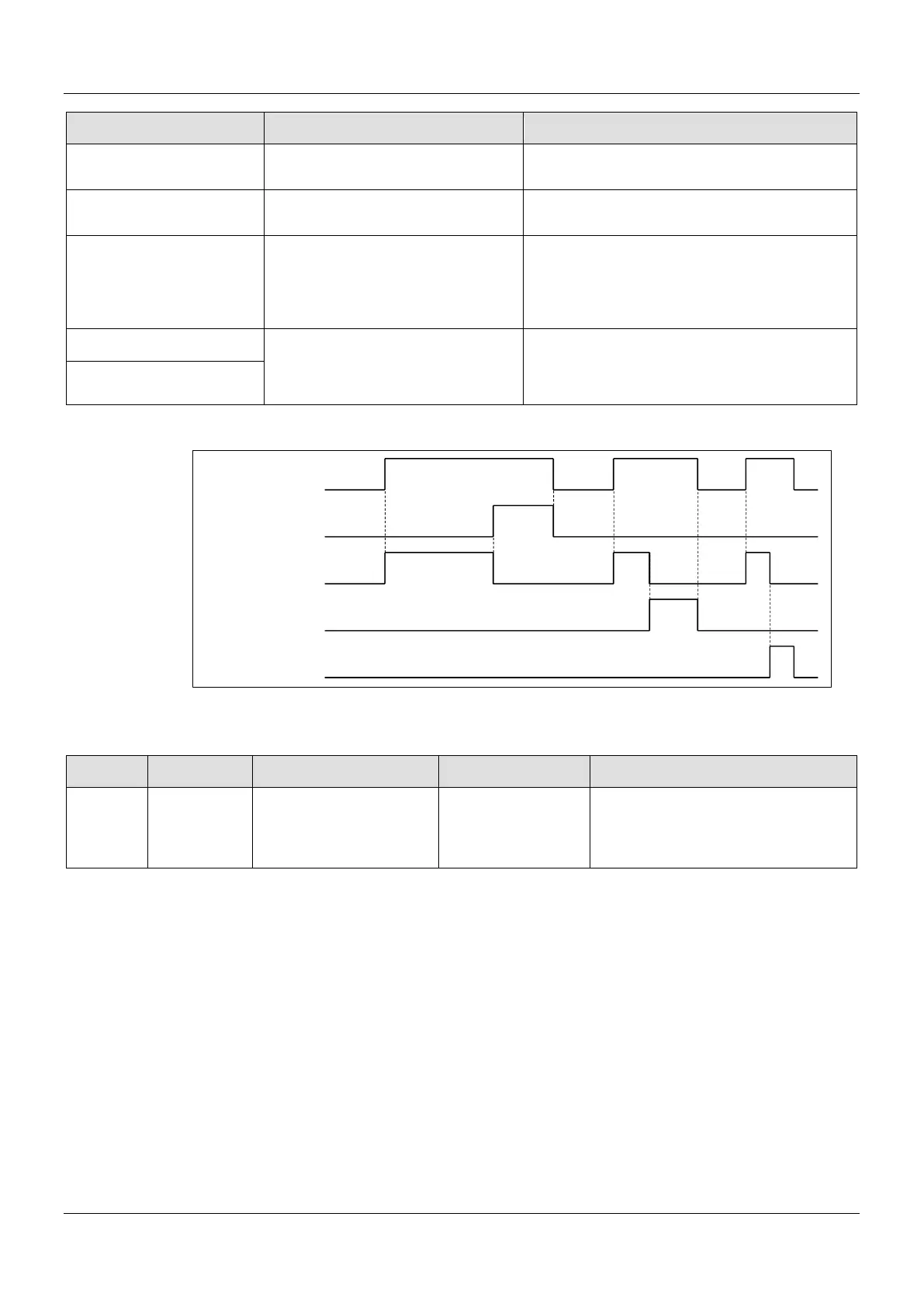
Timing Diagram
Inputs/Outputs
Axis
Specifies the
source of
pulse output
axis
DMC_PULSE_AXIS_
REF (FB) *
DMC_PULSE_
AXIS_REF
When bExecute turns to True and bBusy
is False.
*Note:
DMC_PULSE_AXIS_REF (FB): The function block serves as the drive interface for the pulse output axis, which contains the
axis parameter call and the drive program.
Function
The pulse output axis specified by the instruction must be selected in Hardware IO Configuration so that
the axis can output pulses and perform the homing action according to the pulse axis settings i.e. homing
mode, acceleration rate and velocity.
The instruction can be used only when the pulse output axis is in Standstill state. An error will occur if the
instruction is run in other axis state.
DMC_Home_P supports homing modes defined in CiA 402 protocol. For details on homing modes, refer to
appendices.
Library of this function block: DL_BuiltInIO_AX3.library.
 Loading...
Loading...

