AX-Series Motion Controller Instructions Manual Chapter 2
19
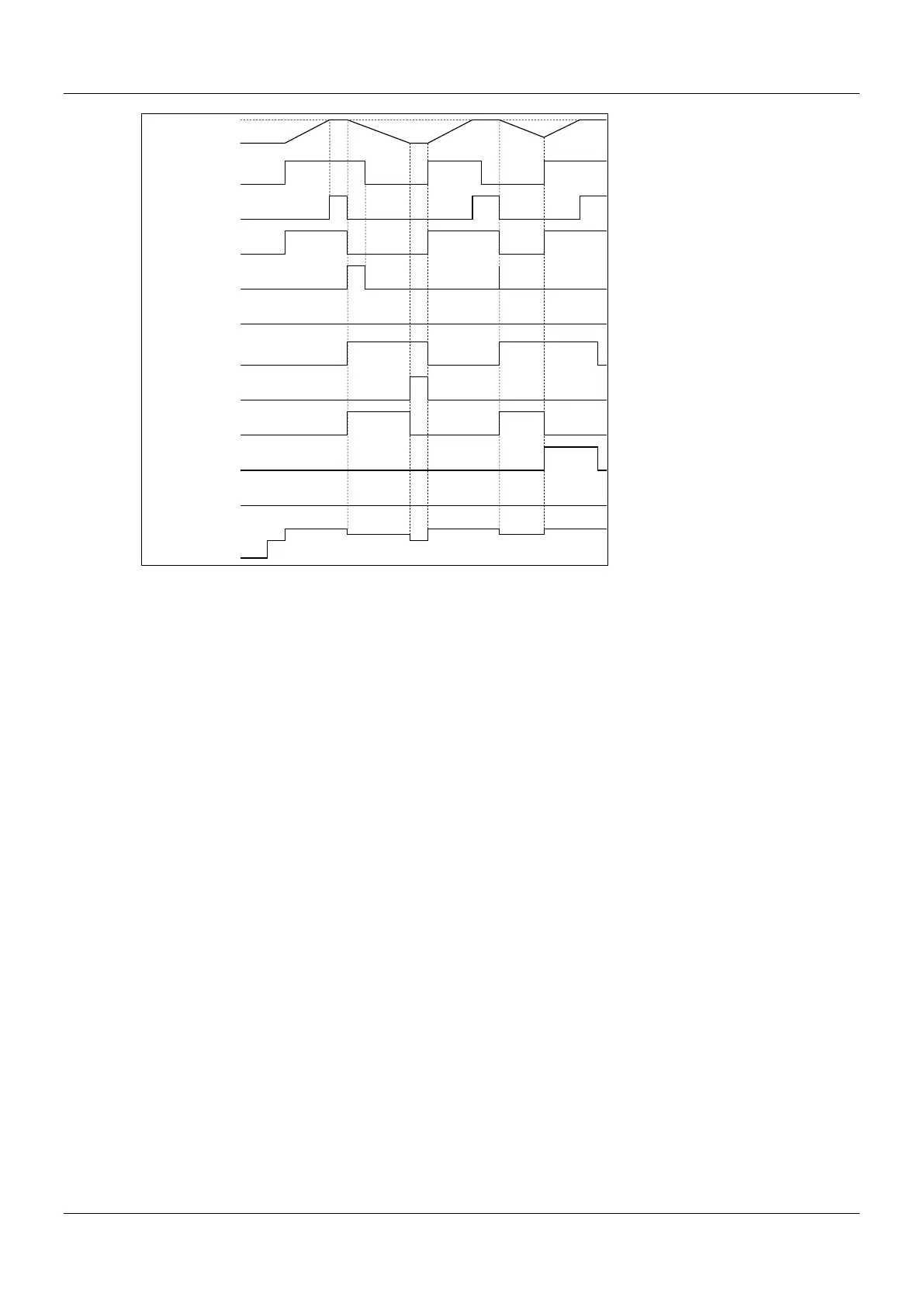
When Execute of MC_Halt changes to True, it triggers CommandAborted of MC_MoveVelocity at the same time,
and the motion controller starts to decelerate the axis to a stop. The Axis state changes to the “DiscreteMotion”.
When the axis reaches zero velocity, Done will change to True. The axis state will change to “Standstill”.
When MC_Halt is not decelerating the axis to zero velocity and Execution is True, the Execute input of
MC_MoveVelocity will change to True again and stop MC_Halt. Which CommandAboted will change to True
with the axis state transferred from discrete_motion to continuous_motion.
 Loading...
Loading...

